可视化三维仿真传感器覆盖和检测项
此示例示出了如何可视化在3D仿真环境从高保真雷达和激光雷达传感器获得的传感器覆盖和检测。在这个例子中,您将学习如何:
您可以使用这些可视化和传感器数据来测试和改善你的自动驾驶算法。也可以扩展这个例子保险丝检测和可视化对象追踪的结果,如图中传感器融合使用Simulink中合成雷达和视觉数据金宝app例。
检查长方体驾驶情形
在这个例子中,地面实况(道路,车道,演员)和车辆轨迹主要是从在创作的情景驾驶场景设计师应用程序。在这个程序,车辆和其他演员都表示为简单的方块形状称为立方体。有关创作长方体方案的更多详情,请参阅建立一个驾驶情形并产生综合检测项例。
打开应用程序的长方体驾驶场景文件。
drivingScenarioDesigner('StraightRoadScenario.mat')
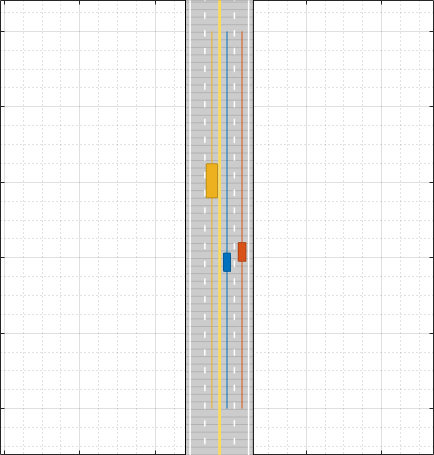
在应用中,运行情景模拟。在这种情况下,自身车辆(蓝色轿车)沿以恒定的速度直北路行驶。在相邻车道,橙色汽车在稍高的恒速行驶北部。在对面车道,黄色卡车驱动南以恒定的速度。

当创作驾驶情况下,你以后在3D模拟环境重现,你必须使用的道路网络相同的一个从默认的三维场景。否则,在重建的情况下,车辆和传感器的位置是不准确的。该驱动方案使用的一个娱乐直路现场。要选择一个3D场景的不同版本的长方体,在应用工具条中,选择打开>预建方案> Simulation3D并从可用场景选择。并非所有的3D场景都有相应的应用程序版本。
对于支持的场景和有关每个场景金宝app的其他详细信息的列表,请参阅在驾驶场景设计三维仿真场景的长方体版本。
为了产生所不具备的应用场景车辆的轨迹,用在描述的过程选择航点的三维仿真例如代替。
车在长方体场景的尺寸也必须匹配的预定义的三维模拟车辆类型中的一个的尺寸。在应用工具条,下3D显示器中,使用三维仿真演员尺寸选择设置每个长方体车辆为具有3D车辆类型的尺寸。在这种情况下,车辆具有这些3D显示类型和相应的车辆的尺寸。
以改变车辆到不同的显示类型,在演员在应用程序的左窗格中选项卡,更新3D显示器类型参数该车辆。要改变车辆的颜色,选择颜色补丁旁边的选择的车辆,并选择新的颜色。
要预览车辆在3D环境中如何显示,使用可从应用程序中的3D显示窗口。在应用工具条中,选择3D显示>在3D显示器查看仿真并重新运行模拟。

打开三维仿真模型
在这个例子中使用的模型再现了长方体驾驶情形。该模型还定义了生成从环境合成检测高保真传感器。打开模型。
open_system('Visualize3DSimulationSensorCoveragesDetections')
检查场景配置
该模拟3D场景配置块配置模型在3D环境中模拟。
该场景名称参数设置为默认
直路现场。这一幕对应于应用场景文件中定义的长方体版本。该现场查看参数设置为
自车辆。在模拟过程中,三维仿真窗口显示本车后方的场景。
该方案读卡器块从应用场景文件中的地面真实数据(道路边界,车道标线,和演员的姿势)。该鸟瞰范围这个可视化地面真实数据,而不是3D模拟环境的地面实况数据。要使用长方体和3D模拟环境中的同一个场景,两个环境的地面实况数据必须匹配。如果要创建一个新的方案,您可以生成一个场景读卡器块,从您的方案文件中读取数据。首先,打开的场景文件驾驶场景设计师应用程序。然后,在应用工具条中,选择导出>导出Simulink模型金宝app。如果更新的情况下,你并不需要产生一个新的方案读卡器块。
仿真三维场景配置块和情景读者阻止都有自己的采样时间参数集0.1。此外,所有其他3D模拟车辆和传感器块继承从模拟三维场景配置块的采样时间。通过跨整个模型设定单个样品时,鸟瞰范围从以恒定速率的所有块中显示数据。如果地面实况和传感器数据具有不同的取样时间,则该范围可视化它们在不同的时间间隔。此过程会导致地面实况和传感器数据可视化来闪烁。
检查车辆配置
该模拟3D车辆与地面跟随块指定在3D模拟环境的外观和车辆的轨迹。每个车辆是直接对应于车辆中的一个所定义的驾驶场景设计师应用场景文件。
在3D环境中,车辆位置在世界坐标。然而,情景阅读器块输出在自主车辆坐标非自我行动者的姿势。一个汽车世界模块将这些非自我演员的姿态进入世界坐标。由于本车是在世界坐标输出,这种转换是没有必要的自我车辆。有关车辆和世界更多的细节坐标系,见坐标系统在自动驾驶的工具箱。
车辆来源的位置长方体和3D场景之间的差异。
在长方体场景中,车辆原点是在地面上,在后轴的中心。
在3D场景中,车辆原点是在地面上,在车辆的几何中心。
该长方体为了三维仿真块转换成长方体原点位置的三维仿真原点位置。在里面actorId来用于转换这些块中的参数,指定的actorId来的各车辆确定转换哪个车辆原点。场景阅读器块输出actorId来在它的值演员输出端口。在里面驾驶场景设计师应用程序,你可以找到相应的actorId来上数值演员选项卡,在演员的选择列表。该actorId来针对每个车辆是先于结肠的值。
每个长方体为了三维仿真模块输出X,ÿ和偏航值直接送入它们相应的车辆块。在3D模拟环境,3D场景的地面地形决定了ž车辆的位上(仰角),侧倾角和俯仰角。
每次模拟的3D车辆与地面跟随块时,类型参数对应于3D显示器类型选择用于在应用该车辆。除此之外颜色参数对应于该应用指定的车辆的颜色。为了维持相似车辆的可视化鸟瞰范围和3D仿真窗口中,指定类型和颜色必须匹配。要改变车辆的颜色的应用程序,在演员选项卡,单击色块演员名字的演员选择列表的权利。选择在可用的颜色最接近的颜色颜色与地面模拟3D车辆参数后面块。
检查传感器配置
该模型包括使用默认参数设置两个传感块。这些块产生从3D模拟环境检测。
虽然我们可以在传感器驾驶场景设计师应用程序并将其导出到Simulink中,导出块金宝app不与3D模拟环境兼容。您必须在模型中直接指定三维模拟传感器。
模拟和可视化场景
在模拟过程中,您可以观察场景的3D仿真窗口和两个鸟瞰范围。
首先,打开的范围。在Simuli金宝appnk的工具条,下审查结果,点击鸟瞰范围。然后,发现范围可以显示信号,请点击查找信号。
要运行模拟,请点击跑无论是在模型或范围。当仿真开始,它可能需要几秒钟的3D模拟窗口进行初始化,尤其是当你运行它在Simulink中会议的第一次。金宝app当这个窗口打开时,它显示具有高保真图形场景,但不显示检测或传感器覆盖范围。

该鸟瞰范围显示器检测和传感器覆盖范围通过使用长方体表示。雷达覆盖区域和检测为红色。激光雷达覆盖区域为灰色,并且其点云检测显示为parula颜色表。

在模型运行以每挂钟第二0.5秒的速度模拟。要调整起搏,在Simulink工具条中,选择金宝app运行>模拟起搏,然后将滑块移动以增加或减少了仿真的速度。
修改驾驶情形
当修改您的驾驶情况下,您可能需要更新的场景驾驶场景设计师应用程序,Simu金宝applink模型,或在这两个地方,这取决于你改变什么。
修改公路网- 在应用程序中,从一个新的预置的场景Simulation3D夹。不要修改这些道路网络或道路将不会匹配在选择3D场景的道路。在模型中,在模拟的3D场景配置块,选择相应的场景场景名称参数。
修改车辆轨迹- 在应用程序中,修改车辆的轨迹,并重新保存该场景。在模型中,你不需要进行任何更新来解释这一变化。该方案读卡器块自动拾取这些更改。
修改车辆出场- 在应用程序中,更新的颜色和3D显示器类型参数的车辆。另外,还要确保3D显示器>使用三维仿真演员尺寸选项被选中。在模型中,更新颜色和类型相应的模拟3D车辆参数与地面跟随块。
添加一个新的车辆- 在应用中,创建一个新的车辆,并指定轨迹,颜色和3D显示类型。在模型中,添加一个新的模拟3D车辆与地面跟随块和相应的长方体为了三维仿真块。成立类似于现有的非自主车辆如何设置这些块。在长方体为了三维仿真块,设置
actorId来的新车。设置一个新的自车辆- 在应用程序中,对演员选项卡中,选择车辆要设置为自车辆和点击设置为自车辆。在模型中,在长方体为了三维仿真块,更新actorId来用于转换参数占该车辆是新的自我车辆。在传感器块中,设置父母名字参数,使得所述传感器被安装到新的自主车辆。
修改或添加传感器- 在应用程序中,你不需要做任何改变。在模型中,修改或添加传感器块。当添加传感器块中,设置父母名字的所有传感器的自主车辆。
为了显现任何更新的情况下鸟瞰范围,你必须点击查找信号再次。如果修改的方案,或有兴趣的只有可视化传感器数据,考虑模拟过程中关闭3D窗口。在模拟的3D场景配置块,清除显示3D仿真窗口参数。
也可以看看
应用
块
相关话题
您还可以选择从下面的列表中的网站:
