模拟3D车辆与地面跟踪
在3D环境中实现跟踪地面的车辆
- 库:
自动驾驶工具箱/仿真3D
车辆动力学模块/车辆场景/ Sim3D / Sim3D车辆/组件
描述
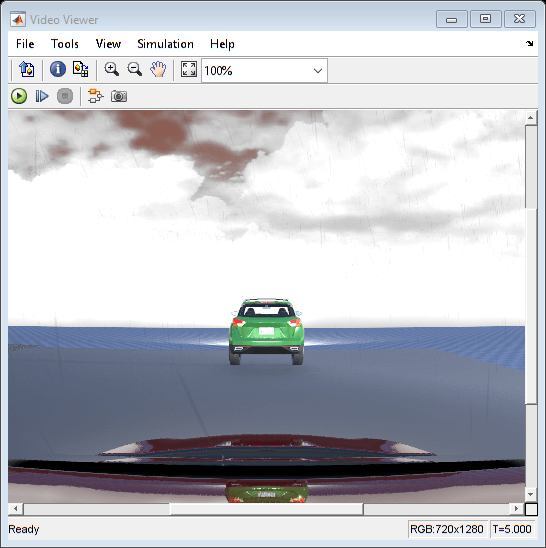
的模拟3D车辆与地面跟踪block在3D仿真环境中实现了带有四个轮子的车辆。这个环境是使用虚幻引擎渲染的®从史诗般的游戏®.块使用输入(X,Y)的位置和偏航角,以调整车辆的仰角、横摇角和俯仰角,使其跟随地面地形。该块决定车辆的速度和方向,并调整方向盘的角度和旋转为每个车轮。使用此块自动驾驶应用程序。
要使用此块,请确保模拟3D场景配置块在模型中。如果你设置样品时间参数的模拟3D车辆与地面跟踪块-1属性中指定的样本时间模拟3D场景配置块。
块输入使用车辆Z在SAE J670中定义的上右(RH)直角坐标系[1]和ISO 8855[2].坐标系为惯性坐标系,初始对准车辆几何中心:
的X-axis是沿着车辆的纵轴,指向前方。
的Y-axis是沿着车辆的横向轴线,指向左侧。
的Z设在点向上。
偏航,俯仰和横摇角度Z设在,Y设在,X-轴,在顺时针方向上是正的,当在这些轴的正方向上看。车辆被放置在场景的世界坐标系中。有关详细信息,请参见自动驾驶工具箱中虚幻引擎仿真的坐标系统.
请注意
的模拟3D车辆与地面跟踪块必须在模拟3D场景配置块。这样,模拟3D车辆与地面跟踪块在虚幻引擎3D可视化环境接收信号数据之前准备信号数据。要检查块执行顺序,右键单击块并选择属性.在一般选项卡,确认这些优先级设置:
模拟3D场景配置- - - - - -
0模拟3D车辆与地面跟踪- - - - - -
-1
有关执行顺序的详细信息,请参见虚幻引擎模拟自动驾驶是如何工作的.
限制
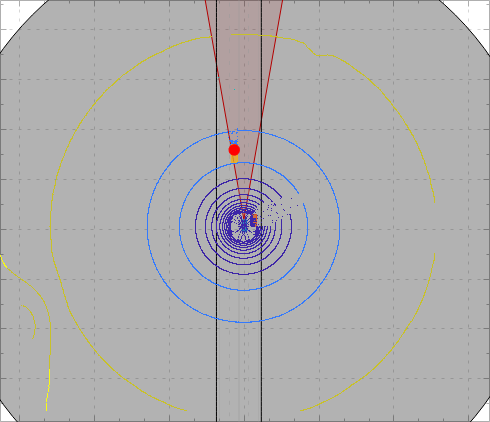
的鸟瞰的范围无法找到地面真实信号,如道路、车道和演员,从模拟3D场景配置块。
港口
输入
输出
参数


参考文献
车辆动力标准委员会。车辆动力学的术语.SAE J670。Warrendale, PA:汽车工程师协会,2008。
技术委员会[2]。道路车辆。车辆动力学和道路保持能力。词汇.ISO 8855:2011。瑞士日内瓦:国际标准化组织,2011。
另请参阅
你也可以从以下列表中选择一个网站:
