模拟3D鱼眼摄像机
三维仿真环境中的鱼眼摄像机传感器模型
- 库:
自动驾驶工具箱/仿真3D
描述
的模拟3D鱼眼摄像机块在3D模拟环境中提供了一个带鱼眼镜头的摄像头接口。这个环境是使用虚幻引擎渲染的®从史诗般的游戏®.该传感器基于Scaramuzza提出的鱼眼摄像机模型[1].块输出具有指定的相机畸变和大小的图像。你也可以在场景的世界坐标系中输出相机的位置和方向。
如果你设置样品时间来-1中指定的采样时间模拟3D场景配置块。要使用这个传感器,你必须包括一个模拟3D场景配置块在模型中。
请注意
的模拟3D场景配置块必须在模拟3D鱼眼摄像机块。这样,虚幻引擎3D可视化环境准备数据之前模拟3D鱼眼摄像机块接收到它。要检查块执行顺序,右键单击块并选择属性.在一般选项卡,确认这些优先级设置:
模拟3D场景配置- - - - - -
0模拟3D鱼眼摄像机- - - - - -
1
有关执行顺序的详细信息,请参见虚幻引擎模拟自动驾驶是如何工作的.
港口
输出
参数
越来越多的
传感器标识符-唯一传感器标识符
1(默认)|正整数
唯一的传感器标识符,指定为正整数。在多传感器系统中,传感器标识符区分传感器。当您添加一个新的传感器块到您的模型,传感器标识符这个区块的核心是N+ 1。N是最高的传感器标识符模型中现有传感器块之间的值。
例子:2
父母的名字—传感器所在的父传感器名称
现场的起源(默认)|车辆名称
传感器安装到的父组件的名称,指定为现场的起源或者作为模型中的车辆名称。您可以选择的车辆名称对应于的名字参数模拟3D车辆与地面跟踪块在您的模型中。如果您选择现场的起源,该模块在场景原点放置传感器。
例子:金宝appSimulinkVehicle1
安装位置-传感器安装位置
起源(默认)|前保险杠|后保险杠|正确的镜子|离开了镜子|后视镜|罩中心|屋顶中心
传感器安装位置。
当父母的名字是
现场的起源,该模块将传感器安装到场景的原点。您可以设置安装位置来起源只有。在仿真过程中,传感器保持静止。当父母的名字是车辆的名称(例如,
金宝appSimulinkVehicle1)块将传感器安装到表中描述的预定义安装位置之一。在模拟过程中,传感器随车辆移动。
| 车辆安装位置 | 描述 | 相对于车辆原点的方向[滚转,俯仰,偏航](deg) |
|---|---|---|
起源 |
前向传感器安装在车辆原点,在地面上,在车辆的几何中心(见自动驾驶工具箱中虚幻引擎仿真的坐标系统)
|
(0, 0, 0) |
前保险杠 |
前置传感器安装在前保险杠上
|
(0, 0, 0) |
后保险杠 |
后置传感器安装在后保险杠
|
(0, 0, 180) |
正确的镜子 |
安装在右侧侧视镜上的向下传感器
|
-90年[0,0] |
离开了镜子 |
安装在左侧视镜上的向下传感器
|
-90年[0,0] |
后视镜 |
安装在汽车内部后视镜上的前向传感器
|
(0, 0, 0) |
罩中心 |
前向传感器安装在引擎盖的中心
|
(0, 0, 0) |
屋顶中心 |
安装在车顶中心的前向传感器
|
(0, 0, 0) |







滚转,俯仰和偏航是顺时针正,当看正向的方向X设在,Y设在,Z分别设在。当从上往下看飞行器时,偏航角(即方向角)是逆时针正的,因为你是在轴的负方向上看。
(X,Y,Z)传感器相对于车辆的安装位置取决于车辆类型。要指定车辆类型,使用类型参数的模拟3D车辆与地面跟踪正在安装传感器的模块。取得(X,Y,Z)车辆类型的安装位置,请参阅该车辆的参考页。
要确定传感器在世界坐标中的位置,打开传感器块。然后,在地面实况选项卡上,选择输出位置(m)和方向(rad)并检查来自位置输出端口。
指定偏移量—指定安装位置偏移量
从(默认)|在
选择此参数以指定从安装位置到相对平移[X, Y, Z] (m)和相对旋转[横摇,俯仰,偏航](deg)参数。
相对平移[X, Y, Z] (m)-相对于安装位置的平移偏移量
(0, 0, 0)(默认)| 1 × 3实值向量
相对于传感器安装位置的平移偏移量,指定为形式的1 × 3实值向量[X,Y,Z].单位是米。
如果您通过设置将传感器安装到车辆上父母的名字和那辆车的名字有关X,Y,Z为车辆坐标系,其中:
的X-轴指向车辆前方。
的Y-轴指向车辆的左边,当观察车辆的前进方向时。
的Z设在点。
原点是在。中规定的安装位置安装位置参数。这个原点与车辆原点不同,车辆原点是车辆的几何中心。
如果您通过设置将传感器安装到场景原点父母的名字来现场的起源,然后X,Y,Z都在现场的世界坐标中。
有关车辆和世界坐标系统的更多细节,请参阅自动驾驶工具箱中虚幻引擎仿真的坐标系统.
例子:(0, 0, 0.01)
依赖关系
要启用该参数,请选择指定偏移量.
相对旋转[横摇,俯仰,偏航](deg)-相对于安装位置的旋转偏移
(0, 0, 0)(默认)| 1 × 3实值向量
相对于传感器安装位置的旋转偏移,指定为形式的1 × 3实值向量[卷,球场,偏航] .横摇、俯仰和偏航是飞行器的旋转角度X-,Y- - - - - -,Z分别相互重合。单位是度。
如果您通过设置将传感器安装到车辆上父母的名字和那辆车的名字有关X,Y,Z为车辆坐标系,其中:
的X-轴指向车辆前方。
的Y-轴指向车辆的左边,当观察车辆的前进方向时。
的Z设在点。
滚动,俯仰和偏航是顺时针正时,看向前的方向X设在,Y设在,Z分别设在。如果你从一个2D自上而下的视角来看一个场景,那么偏航角(也称为方向角)是逆时针正的,因为你是在负的方向看场景Z设在。
原点是在。中规定的安装位置安装位置参数。这个原点与车辆原点不同,车辆原点是车辆的几何中心。
如果您通过设置将传感器安装到场景原点父母的名字来现场的起源,然后X,Y,Z都在现场的世界坐标中。
有关车辆和世界坐标系统的更多细节,请参阅自动驾驶工具箱中虚幻引擎仿真的坐标系统.
例子:(0, 0, 10)
依赖关系
要启用该参数,请选择指定偏移量.
样品时间——样品时间
-1(默认)|正标量
块的采样时间,以秒为单位,指定为正标量。三维仿真环境帧率与采样时间成反比。
如果将示例时间设置为-1,块从模拟3D场景配置块。
参数
这些固有相机参数等价于afisheyeIntrinsics(计算机视觉工具箱)对象。要获得相机的内在参数,请使用相机校准器(计算机视觉工具箱)应用程序。
畸变中心(像素)-畸变中心
(640、360)(默认)| 1 × 2实值向量
畸变中心,指定为实值2元向量。单位是像素。
图像尺寸(像素)-由相机产生的图像大小
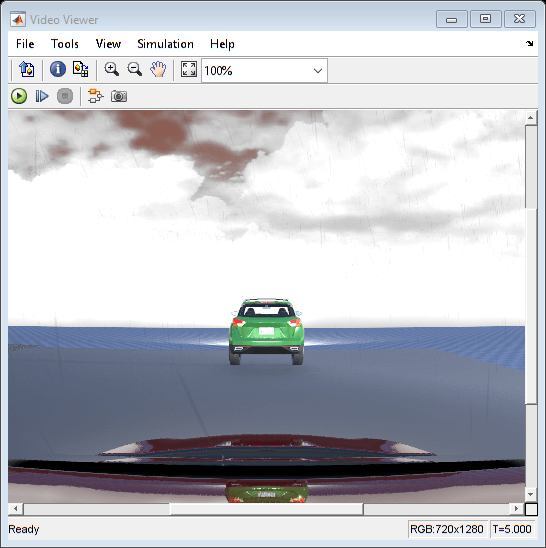
(720、1280)(默认)|实值1 × 2正整数向量
由相机产生的图像大小,指定为形式为正整数的实值1 × 2向量[mrows,ncols].单位是像素。
映射系数-投影函数的多项式系数
[320, 0, 0, 0](默认)| 1 × 4实值向量
由Scaramuzza泰勒模型描述的投影函数的多项式系数[1],指定为这种形式的1 × 4实值向量[a0 a2 a3 a4].
例子:[320, -0.001, 0,0]
弹性矩阵—将点从传感器平面转换为摄像机平面
[1 0;0, 1](默认)|实值2 × 2矩阵
将一个点从传感器平面转换为摄像机图像平面中的一个像素。在数字化过程中,当镜头与传感器不平行时,就会发生对中。
例子:[0, 1;0, 1]
地面实况
输出位置(m)和方向(rad)-传感器输出位置和方向
从(默认)|在
选择此参数可输出传感器在位置和取向端口,分别。
模型的例子
提示
因为虚幻引擎可能需要很长时间才能在模拟之间启动,所以可以考虑记录传感器输出的信号。然后你可以使用这些数据在MATLAB中开发感知算法®.看到配置日志信号(金宝app模型).
您还可以通过使用多媒体文件(计算机视觉工具箱)块。有关此设置的示例,请参见使用虚幻引擎模拟环境设计车道标记检测器.
参考文献
Scaramuzza, D., A. Martinelli和R. Siegwart。"方便校准非定向摄像机的工具箱"IEEE智能机器人与系统国际会议论文集.2006年10月7日至15日,中国北京。
另请参阅
块
应用程序
- 相机校准器(计算机视觉工具箱)
对象
fisheyeIntrinsics(计算机视觉工具箱)
主题
- 虚幻引擎模拟自动驾驶
- 自动驾驶工具箱中虚幻引擎仿真的坐标系统
- 为虚幻引擎模拟选择一个传感器
- 鱼眼校正基础知识(计算机视觉工具箱)
你也可以从以下列表中选择一个网站:
