方案读卡器
将驾驶场景读入模型
- 图书馆:
自动驾驶工具箱/驾驶情形和测量建模
描述
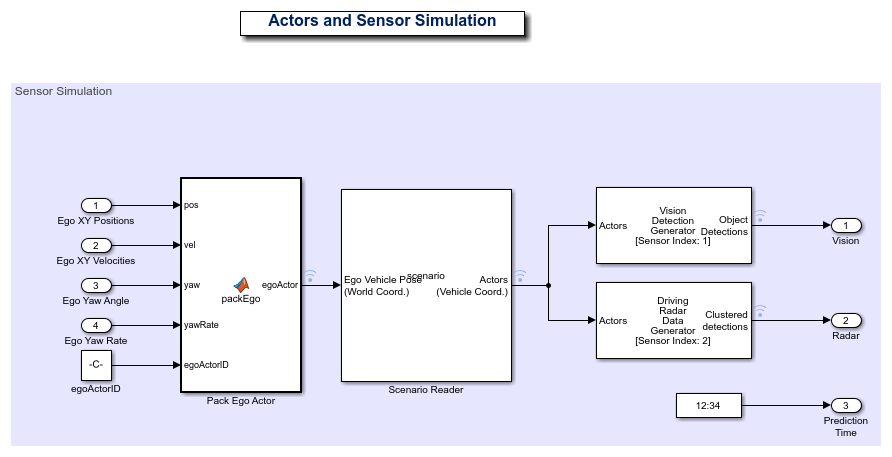
该方案读卡器块从使用驾驶场景设计师应用程序或从drivingScenario对象。该块输出在任一自主车辆的坐标系或场景的世界坐标行动者的姿势。您还可以输出车道边界或输出自身车辆的姿态在3D模拟环境中使用。
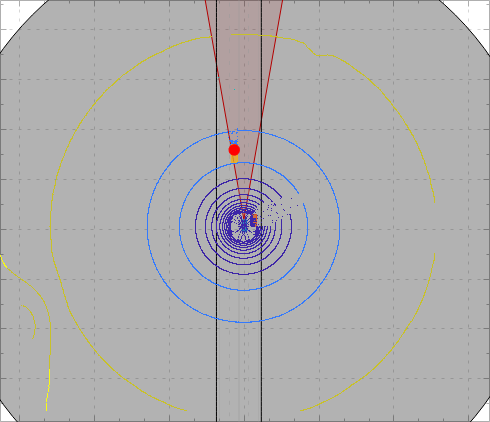
从输出行动者位姿和车道边界生成目标和车道边界检测,将位姿和车道边界输出传递给视觉检测发电机和雷达探测发电机传感器模块。使用生成的、合成的检测来测试传感器融合算法、跟踪算法和其他自动驾驶辅助系统(ADAS)算法的性能。若要可视化这些算法的性能,请使用鸟瞰的范围。
您可以从场景中读取自我车辆,或者指定模型中定义的自我车辆作为到方案读卡器块。使用此选项测试闭环车辆控制器算法,如自动紧急制动(AEB),车道保持辅助(LKA),或自适应巡航控制(ACC)。
限制
港口
输入
产量
参数
驾驶场景来源-驾驶场景的来源
从文件(默认)|从工作区
驾驶场景的来源,指定为这些选项之一:
从文件- 在里面驾驶场景设计文件名参数,指定从保存的场景文件的名称驾驶场景设计师应用程序。从工作区- 在里面MATLAB或模型工作区变量名参数,指定包含一个或MATLAB模型工作变量的名称drivingScenario对象。
驾驶场景设计文件名-场景文件名
EgoVehicleGoesStraight.mat(默认)|场景文件在MATLAB中搜索路径|到场景文件的路径
场景文件名,指定为MATLAB的搜索路径上的场景文件或完整路径的场景文件。一个场景文件,必须从保存MAT文件驾驶场景设计师应用程序。如果自车辆的来源参数设置为脚本,那么场景必须包含一个自我载体。否则,块将在模拟期间返回一个错误。
如果指定的场景文件包含传感器,则块将忽略它们。要在模型中包含来自场景的传感器,请参见提示。
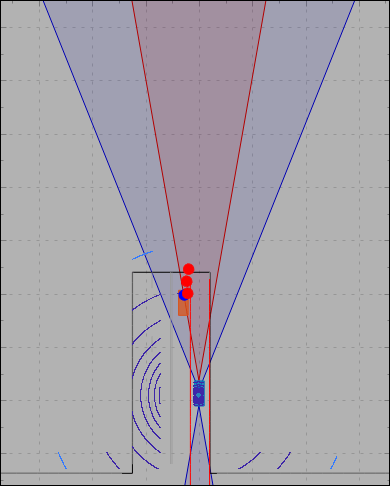
默认的场景文件显示一辆ego车辆在一条笔直的双车道道路上向北行驶,而另一辆车辆在相反的车道上向南行驶。
要添加场景文件到MATLAB的搜索路径,使用目录函数。例如,这段代码添加了一组包含预构建的Euro NCAP的文件夹®场景到MATLAB的搜索路径。
路径= fullfile (matlabroot,“工具箱”,“驾驶”,“drivingdata”,...'PrebuiltScenarios',“EuroNCAP”);目录genpath(路径))
在驾驶场景设计文件名参数,则可以指定位于这些文件夹中的任何方案的名称,而不必指定完整的文件路径。例如:AEB_PedestrianChild_Nearside_50width.mat。
当您在模型中使用该场景时,您可以使用rmpath函数。
rmpath (genpath(路径))
依赖
若要启用此参数,请设置驾驶场景来源至从文件。
MATLAB或模型工作区变量名- 情景变量名
脚本(默认)|drivingScenario对象变量名
场景变量名,指定为包含有效变量的MATLAB或模型工作区变量的名称drivingScenario对象。如果在MATLAB和模型工作区中都出现具有相同名称的场景变量,则块将使用在模型工作区中定义的变量。
如果自车辆的来源参数设置为脚本,那么drivingScenario客体必须包含自我载体。要指出对象中的哪个行动者是自我的载体自车辆的actorId参数,指定actorId来该演员的属性值。
当连接演员输出端口雷达探测发电机或视觉检测发电机块,更新这些块直接从获得的演员型材drivingScenario对象。在演员简介每个块的标签中,设置选择方法来指定演员型材参数MATLAB的表情。然后,设置MATLAB表达对演员谱参数来调用actorProfiles在对象上的功能。例如:actorProfiles(场景)。
默认变量名,脚本的默认名称drivingScenario对象由从导出的MATLAB函数产生驾驶场景设计师默认情况下,这个变量不包括在MATLAB或模型工作区中。
依赖
若要启用此参数,请设置驾驶场景来源至从工作区。
协调演员输出的系统- 协调演员输出系统
车辆坐标(默认)|世界坐标
坐标的输出的行动者,指定为这些值中的一个的系统:
车辆坐标- 坐标相对于所述自身车辆所定义。当您的方案只有一个自车辆选择此值。世界坐标- 坐标相对于驾驶情形定义。选择在包含多个自车辆多代理场景这个值。如果选择此值,模型可视化使用鸟瞰的范围不支持。金宝app
有关车辆和世界坐标系统的详细信息,请参阅坐标系统在自动驾驶的工具箱。
自车辆的来源-自我车辆的来源
脚本(默认)|输入端口
自我车辆的来源,指定为这些选项之一:
脚本-使用由。指定的场景中定义的自我车辆驾驶场景设计文件名或MATLAB或模型工作区变量名参数。自身车辆的姿态被从排除演员输出端口。参与者位置在车辆坐标中,这意味着他们相对于场景中自我车辆的世界坐标位置。选择此选项可测试开环ADAS算法,在自身车辆的行为是预定义的,不改变的情况下前进。对于一个示例,请参见使用驾驶场景测试开环ADAS算法。
输入端口-指定自我车辆使用自我的车辆输入端口。自我交通工具的姿势不包括在内演员输出端口。有了这个选项,你的模型中的自我车辆必须包含一个世界坐标的起始位置。所有其他演员的姿势都是在车辆坐标和定位相对于自我车辆。有关具有定义位置信息的ego车辆的示例,请参见车道保持协助车道检测。在定义ego vehicle的起始位置时,考虑使用场景中已经定义的位置。通过使用这个位置,如果你设置自车辆的来源至
脚本然后回输入端口,您不必手动更改起始位置。选择此选项可测试闭环ADAS算法,在自身车辆到做出反应变化方案的进展。对于一个示例,请参见使用驾驶场景测试闭环ADAS算法。
依赖
若要启用此参数,请设置协调演员输出的系统至车辆坐标。
输出自车辆姿态- 自车辆的输出姿势
从(默认)|在
选择此参数以输出在点处的自我车辆的姿态自我的车辆端口。
依赖
若要启用此参数,请设置协调演员输出的系统至车辆坐标和自车辆的来源至脚本。
自我车辆跟随地面-东方自我车辆遵循路面
从(默认)|在
选择此参数可使车辆的方向随路面高度变化。块更新自我车辆的高度、横摇、俯仰和偏航,并输出相对于更新的自我车辆坐标的参与者和车道边界。块不更新自我车辆的速度或角速度。
在路网高程变化的闭环仿真中使用该参数。
注意
在不同海拔和倾斜角度的路口,更新的车辆价值可能不准确。
在开环仿真中自车辆的来源被设置为脚本, ego车辆遵循在驾驶场景中指定的海拔。
依赖
若要启用此参数,请设置协调演员输出的系统至车辆坐标和自车辆的来源至输入端口。
自车辆的actorId- 自主车辆的演员ID
1(默认)|正整数
自身车辆的演员ID,指定为一个正整数。当你想使用从读自车辆模拟使用此参数drivingScenario对象。块获得从ID值actorId来存储在所述车辆的属性演员财产的drivingScenario对象。
车辆必须是车辆使用车辆函数。ID值必须是有效的actorId来在方案中。
要检查有效actorId来值的drivingScenario对象,使用此语法。
actorIDs = [scenarioVariableName.Actors.ActorID]
依赖
要启用此参数,设置按以下顺序进行参数:
组驾驶场景来源至
从工作区。组协调演员输出的系统至
车辆坐标。组自车辆的来源至
脚本。
采样时间(s)-模拟的采样时间
0.1(默认)|正实标
模拟的样本时间,以秒为单位,指定为正实标量。不支持继承和连续采样时间。金宝app这个样本时间和这个样本时间是分开的驾驶场景设计师应用程序和drivingScenario对象使用了模拟。
车道输出边界-车道边界输出
没有一个(默认)|车辆道界线|所有车道边界
车道边界输出,指定为这些选项之一:
没有一个- 不输出任何巷道边界。车辆道界线-输出ego车辆的左车道和右车道边界。所有车道边界- 输出其自身车辆正在行驶的道路的所有车道边界。
如果您选择车辆道界线或所有车道边界,则该块返回车道边界输出端口。
依赖
若要启用此参数,请设置协调演员输出的系统至车辆坐标。
计算边界的自我车辆距离(m)- 从自车辆的距离,在其计算车道边界
linspace (-150150101)(默认)|ñ元实值向量
从ego车辆到计算车道边界的距离,指定为ñ- 元素实值向量。ñ是距离值的数目。当检测到来自后置摄像头车道,指定负的距离。当检测来自前置照相机车道,指定正距离。单位为米。
默认情况下,块计算101车道边界的范围从自我车辆后面150米到自我车辆前面150米。这些距离是间隔3米的线性距离。
例子:1:0.1:10计算边界每0.1米在从前方的自主车辆的1至10米的范围内的车道。
依赖
若要启用此参数,请设置车道输出边界至车辆道界线或所有车道边界。
在车道标记边界位置-行车线界线位置
车道标线的中心(默认)|道路标记的内边缘
在行车道标志,指定为在此表中的选项之一车道边界位置。
| 车道边界位置 | 描述 | 例子 |
|---|---|---|
车道标线的中心 |
车道边界以车道标志为中心。 | 一个三车道的道路有四车道的边界:每车道标志之一。
|
道路标记的内边缘 |
车道边界位于车道标记的内侧边缘。 | 三车道的道路有六个车道边界:每个车道两个。
|


依赖
若要启用此参数,请设置车道输出边界至车辆道界线或所有车道边界。
参与者总线名称的来源-演员的名字来源构成总线
汽车(默认)|财产
名称的来源在返回的演员姿势总线演员输出端口,指定为以下选项之一:
汽车块自动创建一个actor构成总线名。财产- 通过使用指定演员的姿势总线名称演员总线名称参数。
演员总线名称-演员的名字构成巴士
有效总线名
在返回的演员姿势总线的名称演员输出端口,指定为有效的总线名。
依赖
若要启用此参数,请设置参与者总线名称的来源至财产。
车道边界总线名称的来源-车道边界总线的名称来源
汽车(默认)|财产
中返回的车道边界总线的名称的源车道边界输出端口,指定为以下选项之一:
汽车块自动创建一个车道边界总线名称。财产- 通过指定车道边界总线名称车道边界总线名称参数。
依赖
若要启用此参数,请设置车道输出边界至车辆道界线或所有车道边界。
车道边界总线名称-车道边界巴士的名称
有效总线名
在返回的车道边界总线的名称车道边界输出端口,指定为有效的总线名。
依赖
启用此参数:
组车道输出边界至
车辆道界线或所有车道边界。组车道边界总线名称的来源至
财产。
显示坐标的标签- 显示坐标的输入和输出的系统
在(默认)|从
选择此参数显示的所述块的输入和输出的坐标系方案读卡器在方框图中的块。
该自我的车辆输入和输出始终处于世界坐标。
该车道边界输出总是在车辆坐标中。
您可以返回演员输出在车辆或世界坐标,取决于协调演员输出的系统参数的选择。


提示
为了达到最佳效果,只能使用一个活动方案读卡器每个模型块。在一个模型中使用的多个场景阅读器块,通过在一个变型子系统指定它们在块之间进行切换。
为了测试您的驾驶场景的变化算法,可以更新模拟的场景。
如果场景的源是一个场景文件,请在驾驶场景设计师应用程序,更新参数,并重新保存文件。
如果场景的源是a
drivingScenario对象,更新MATLAB或模型工作区中的对象。或者,将对象导入应用程序,修改应用程序中的场景,然后从应用程序生成一个新对象建立驾驶场景的变化编程。
要在具有不同参数设置的场景之间切换,可以使用金宝app仿真软件测试™软件对于一个示例,请参见使用Simulink测试一个跟随控制程序金宝app(金宝appSimulink的测试)。
扩展功能
介绍了在R2019a
你也可以从以下列表中选择一个网站:
