主要内容
多目标跟踪
创建和管理多个对象的轨迹
- 图书馆:
自动驾驶工具箱
描述
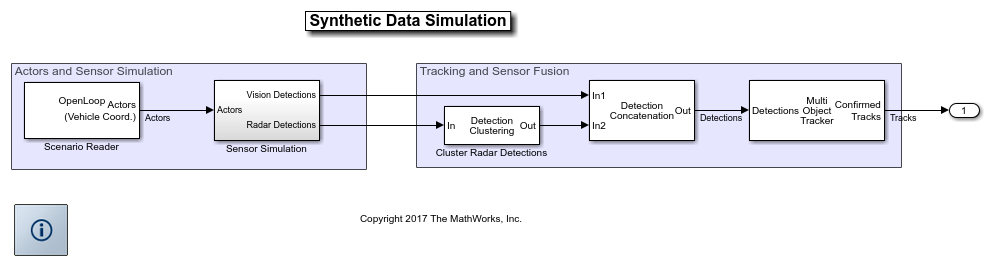
这个多目标跟踪块初始化、确认、预测、纠正和删除移动对象的轨迹。输入到多目标跟踪器的是由驱动雷达数据发生器和视觉检测发电机块。多目标跟踪器接受来自多个传感器的检测,并使用全局最近邻(GNN)准则将其分配到跟踪对象。每个检测被分配到一个单独的轨道。如果检测不能被分配到任何轨道,多目标跟踪器创建一个新的轨道。
一条新的赛道在一个小时内开始试探性的状态。如果将足够多的检测分配给暂定轨迹,其状态将更改为确认.当轨迹被确定时,多目标跟踪器认为该轨迹代表一个物理对象。如果在指定数量的更新中未将检测添加到轨道中,则轨道将被删除。
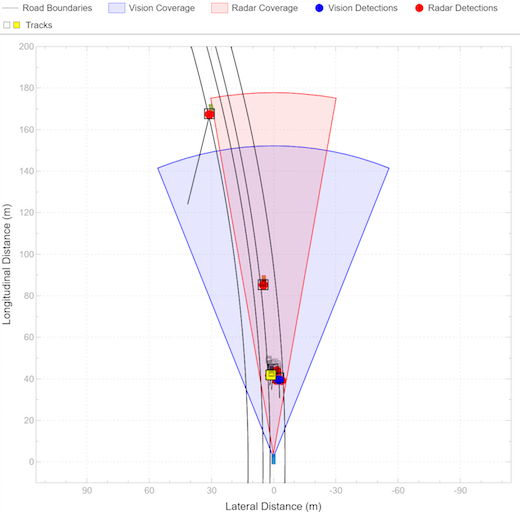
多目标跟踪器还利用卡尔曼滤波估计每个航迹的状态向量和状态向量协方差矩阵。这些状态向量用于预测轨道在每一帧中的位置,并确定分配给每个轨道的每个检测的可能性。
港口
输入
输出
参数
扩展功能
在R2017b中引入
你也可以从以下列表中选择一个网站:
