主要内容
检测替补
结合不同传感器的检测报告
- 库:
自动驾驶的工具箱
传感器融合和跟踪工具箱/工具
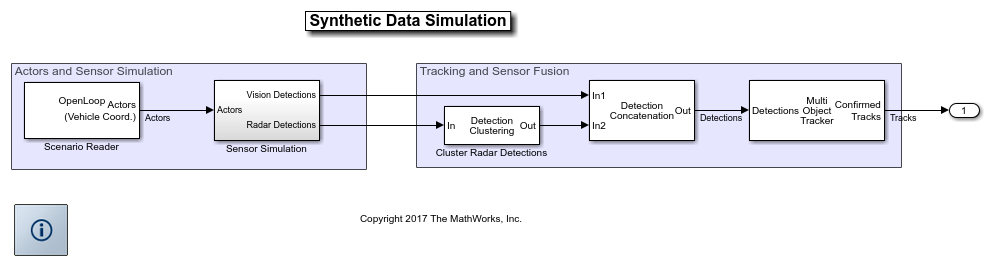
描述
的检测替补块将多个传感器的检测报告结合到单个输出总线上。级联是有用的,当多个传感器块的检测被传递到跟踪块,如多目标跟踪堵塞。您可以通过更改额外的传感器来容纳额外的传感器要组合的输入传感器的数量参数,以增加输入端口的数量。
港口
输入
输出
参数
扩展功能
介绍了R2017b
你也可以从以下列表中选择一个网站:
