跟踪和传感器融合
对象跟踪和多传感器融合,鸟瞰检测和物体轨道
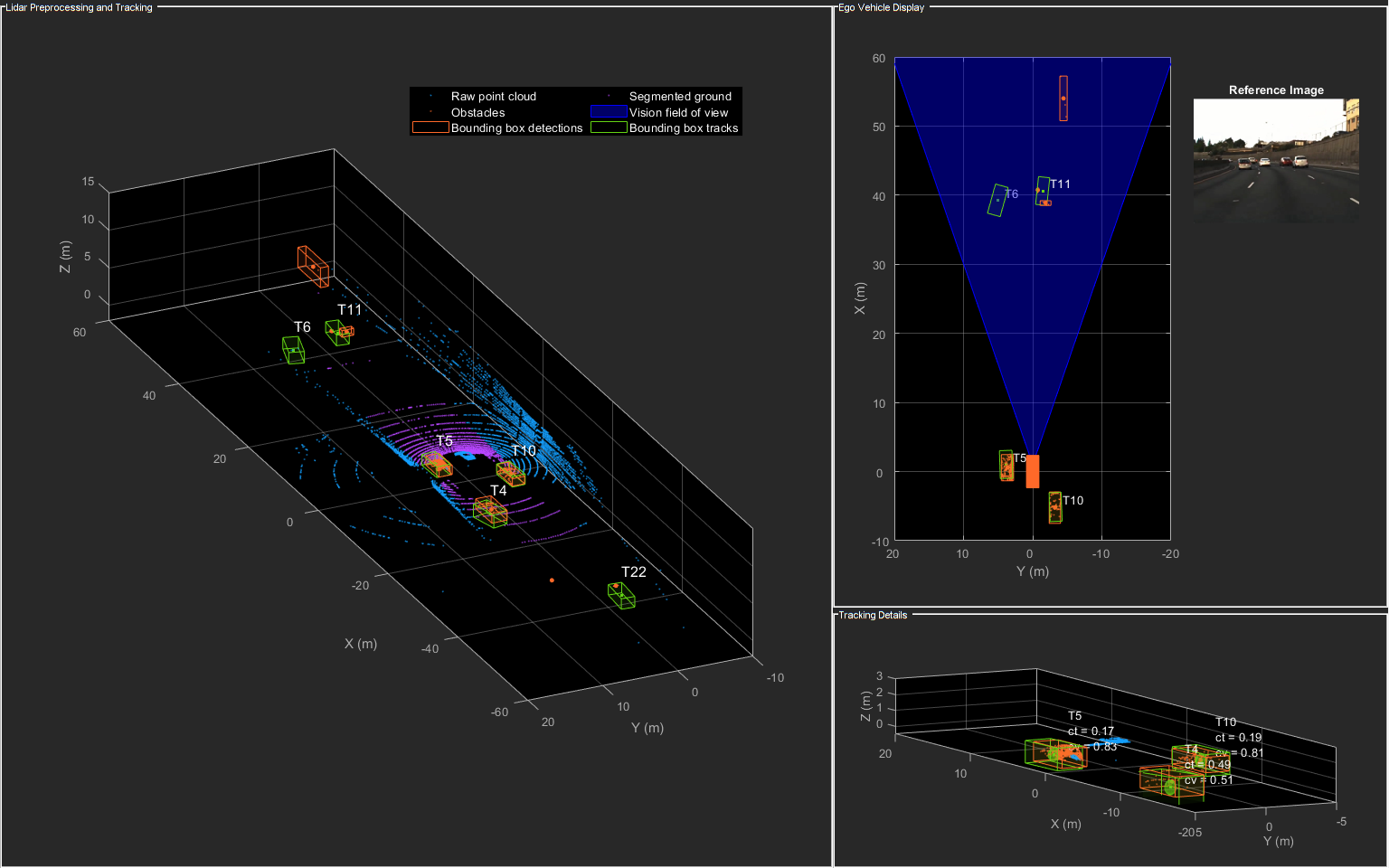
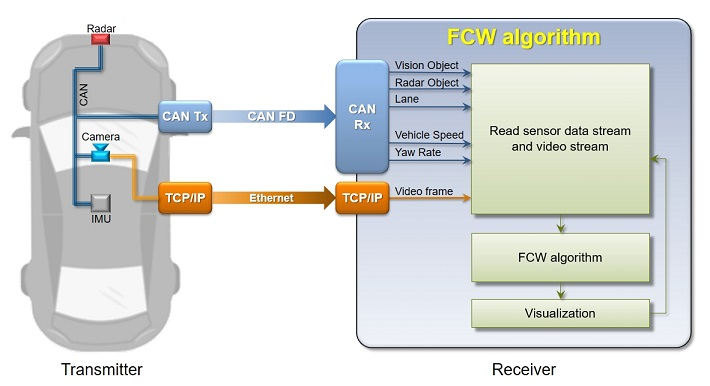
您可以创建一个多目标跟踪器,以熔化雷达和摄像机传感器的信息。跟踪器使用卡尔曼过滤器,让您估计检测到的对象的运动状态。使用在检测到的物体上进行的传感器测量,以连续地解决该对象的位置和速度。要跟踪移动对象,可以使用恒定速度或常量加速运动模型,或者您可以定义自己的型号。
职能
块
应用
| 鸟瞰 | 可视化传感器覆盖,检测和轨道 |
主题
多对象跟踪
使用安装在车辆中的单眼摄像头检测和跟踪多个车辆。
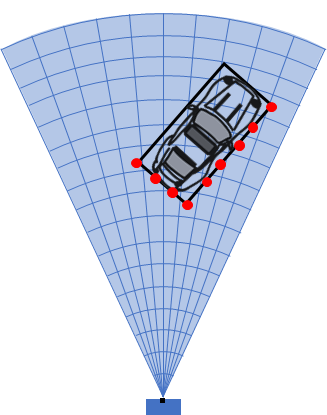
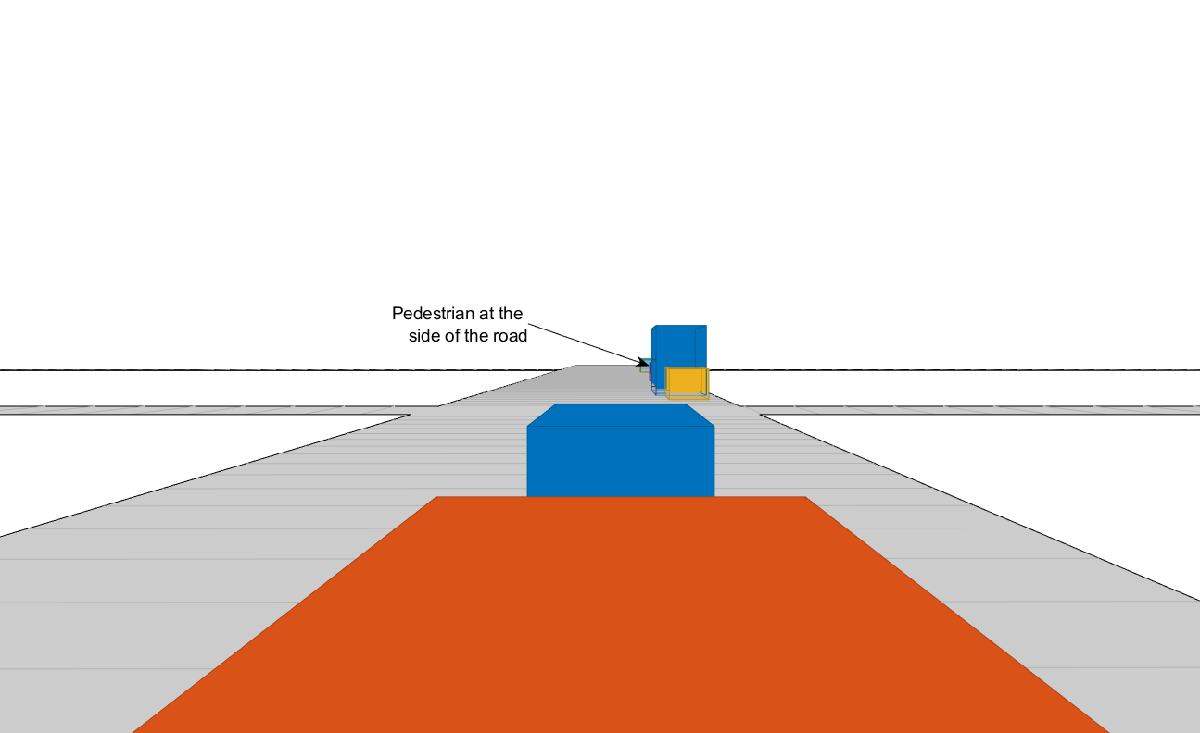
使用安装在移动车内的相机跟踪行人。
通过使用多目标跟踪器来执行视频中移动对象的自动检测和运动基于动作的跟踪。
使用线性卡尔曼滤波器估计和预测对象运动。
使用扩展卡尔曼滤波器估计和预测对象运动。
传感器融合与合成数据
生成方案,模拟传感器检测,并使用传感器融合来跟踪模拟车辆。
使用SIMULINK中的合成雷达和视觉数据的传感器融合金宝app
在Simulink中实现用于跟踪和传感器融合的合成数据仿真金宝app®自动化驾驶工具箱™。
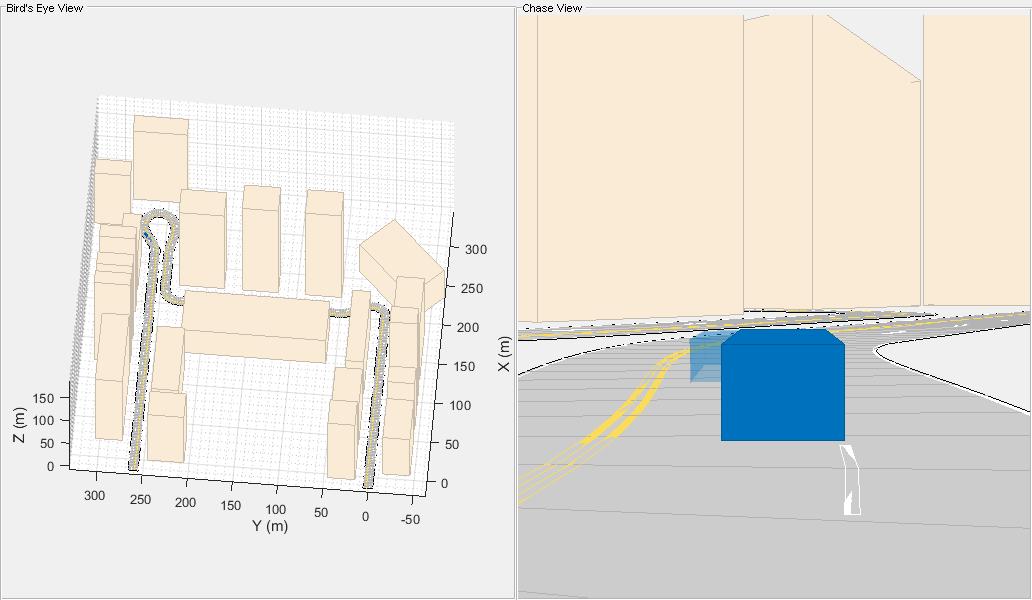
可视化
在Simulink模型中可视化传感器覆盖,检测和曲目。金宝app
配置并使用鸟瞰图来显示自助式车辆周围的传感器覆盖,检测和跟踪结果。
特色例子


您还可以从以下列表中选择一个网站:
