主要内容
ctmeas
恒定转速运动的测量功能
语法
描述
测量= ctmeas (状态,measurementParameters)measurementParameters.
例子
输入参数
输出参数
更多关于
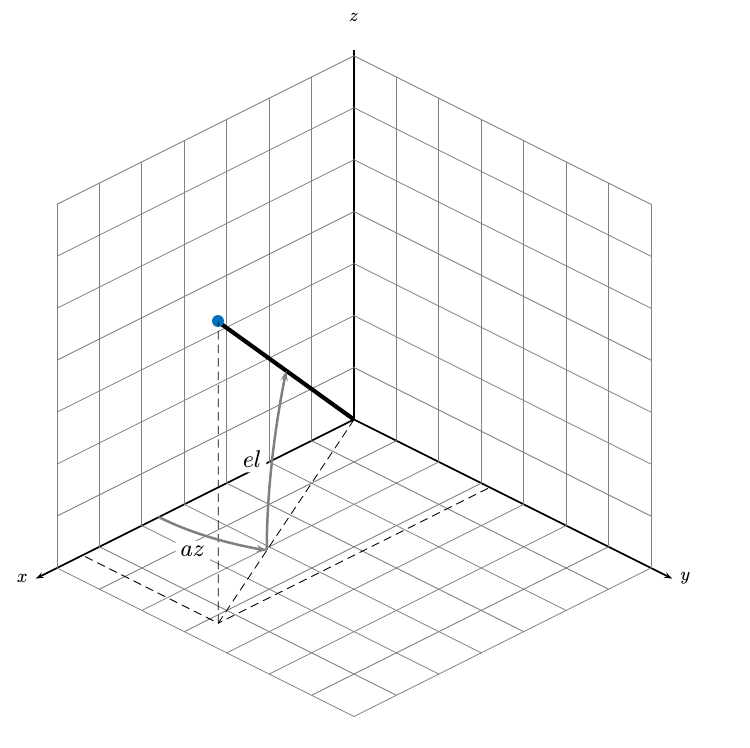
方位角和仰角定义
定义工具箱中使用的方位角和仰角。
的方位角向量的夹角x轴和它在xy飞机。这个角度从x轴向y轴。方位角介于-180度和180度之间。的仰角向量和它在向量上的正交投影的夹角是多少xy飞机。当朝向正的时候角度是正的z设在从xy飞机。
扩展功能
另请参阅
功能
constacc|constaccjac|cameas|cameasjac|constturn|constturnjac|ctmeasjac|constvel|constveljac|cvmeas|cvmeasjac
对象
介绍了R2017a
你也可以从以下列表中选择一个网站:
