主要内容
plotPath
在鸟瞰图上显示演员路径
描述
plotPath (从鸟瞰图的路径坐标列表中显示演员的路径。路径绘图仪对象,pPlotter,pathCoords)pPlotter,与a相关联Birdseyebplot.对象,并配置指定路径的显示。
删除与路径绘图仪关联的所有路径pPlotter,打电话给clearData功能和指定pPlotter作为输入参数。
例子
自我车辆的绘图路径
创建一个3米宽的车道。
LB =抛物线林([ - 0.001,0.01,1.5]);Rb =抛物线林([ - 0.001,0.01,-1.5]);
手动计算车道边界模型沿0 - 30米x设在。
xWorld =(破发);xWorld yLeft = computeBoundaryModel(磅);xWorld yRight = computeBoundaryModel (rb);
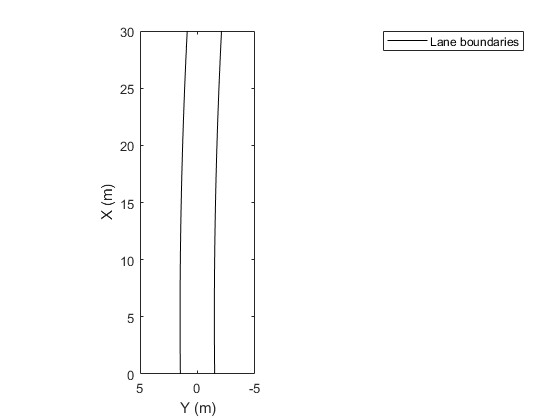
创建一个鸟瞰图和车道边界标绘器。在鸟瞰图上显示车道信息。
cep = birdsEyePlot (“XLimits”, 30 [0],“YLimits”5 [5]);lanePlotter = laneBoundaryPlotter (cep),“DisplayName的”,“车道边界”);plotLaneBoundary (lanePlotter {[xWorld yLeft], [xWorld yRight]});
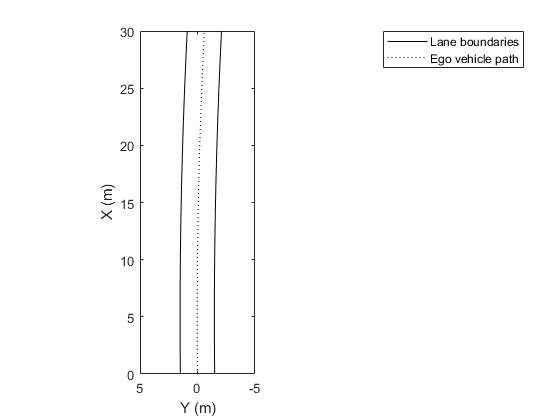
创建路径绘图仪。创造并显示自我车辆通过车道中心的路径。
yCenter = (yLeft + yRight)/2;egoPathPlotter = pathPlotter (cep),“DisplayName的”,“自我车辆路径”);plotPath (egoPathPlotter {[xWorld, yCenter]});
输入参数
pPlotter- - - - - -路径绘图仪
PathPlotter对象
路径绘图器,指定为PathPlotter对象。对象存储在策划者财产的Birdseyebplot.对象,并配置鸟眼图中指定角色路径的显示。要创建此对象,请使用pathPlotter函数。
pathCoords- - - - - -路径坐标
单元阵列的米2实值矩阵
路径坐标,指定为单元格数组米2实值矩阵。每个矩阵表示不同路径的坐标。米是路径上的坐标数,每个路径都不同。每个矩阵的第一和第二列分别表示(X,Y)路径曲线的位置。积极的X-方向指向车辆中心的前方。积极的Y-方向指向车辆原点的左侧,即后轴的中心,如图所示的车辆坐标系。
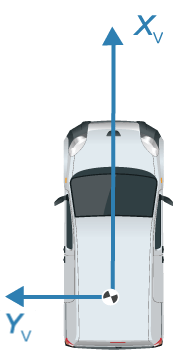
路径坐标是相对于自我载体的。
介绍了R2017a
你也可以从以下列表中选择一个网站:
