主要内容
plotTrack
在鸟瞰图上显示物体轨迹
语法
描述
plotTrack (在鸟瞰图上显示对象位置列表中的对象轨迹。绘图机,tPlotter,职位)tPlotter,与a有关birdsEyePlot对象并配置对象轨迹的显示。
移除与航迹绘图仪相关的所有航迹tPlotter,叫clearData功能和指定tPlotter作为输入参数。
例子
创建并显示鸟眼图上的标记轨迹
创建一个鸟瞰图与x-轴范围从0到90米和ay-axis范围从-35米到35米。创建一个轨迹绘图仪,为每个轨道显示最多7个历史值,并在轨道前方3米处偏移标签。
cep = birdsEyePlot (“XLim”90年[0],“YLim”35 [-35]);tPlotter = trackPlotter (cep),“DisplayName的”,“跟踪”,“HistoryDepth”7“LabelOffset”[3 0]);
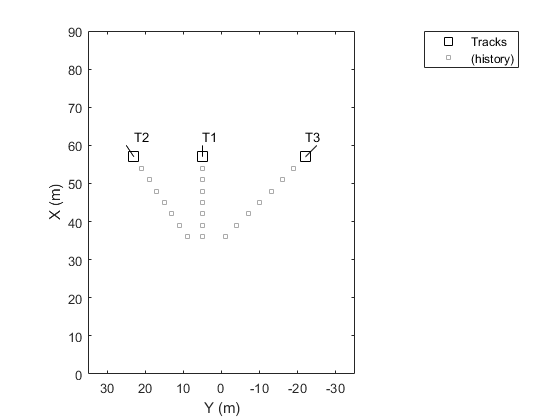
设置三个标记道的位置和速度。
头寸= [30,5;30日,5;30日,5];速度= [3,0;3、2;3, 3);标签= {“T1”,《终结者2》,“T3”};
显示10次试验的轨道。鸟瞰图显示了之前指定的7个历史值。
为i = 1:10 plotTrack (tPlotter,位置,速度,标签);位置=位置+速度;结束
输入参数
tPlotter- - - - - -跟踪绘图机
TrackPlotter对象
轨道绘图仪,指定为TrackPlotter对象。对象存储在策划者财产的birdsEyePlot对象,并配置鸟眼图中指定轨迹的显示。要创建此对象,请使用trackPlotter函数。
职位- - - - - -跟踪目标位置
米2实值矩阵
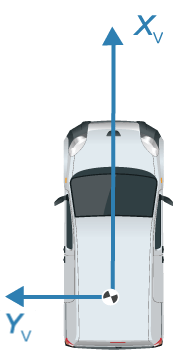
被跟踪物体在车辆坐标中的位置,指定为米- × 2实值矩阵(X,Y)的位置。米为跟踪对象的数量。积极的X-方向指向车辆中心的前方。积极的y-direction指向车辆原点的左侧,即后轴的中心,如图所示。
速度- - - - - -跟踪对象的速度
米2实值矩阵
被跟踪物体的速度,指定为米的速度实值矩阵(X,Y)方向。米为跟踪对象的数量。速度以线矢量的形式绘制出来,线矢量来源于被跟踪物体的中心位置。
协方差- - - - - -轨道不确定性的协方差
2 2 -米实值数组
以轨道位置为中心的轨道不确定性的协方差,指定为2 × 2 × -米实值数组。不确定度绘制成椭圆。
另请参阅
介绍了R2017a
你也可以从以下列表中选择一个网站:
