主要内容
plotPointCloud
在鸟瞰图上显示生成的点云
描述
plotPointCloud (显示由点云数据对象生成的点云,pcPlotter,pcObject)pcObject.点云绘图仪,pcPlotter,与a有关birdsEyePlot对象,并配置指定点云的显示。
要删除与点云绘图仪关联的点云,请使用clearData函数与pcPlotter指定为输入参数。
plotPointCloud (指定点云数据为二维或三维点的矩阵,pcPlotter,pointCloudMatrix)pointCloudMatrix.
例子
生成多角色激光雷达点云数据
的方法生成具有多个参与者的驾驶场景的激光雷达点云数据lidarPointCloudGenerator系统对象。使用drivingScenario对象。它包括一个自我的车辆,行人和其他两辆车。
创建并绘制一个有多辆车的驾驶场景
创建一个驾驶场景。
场景= drivingScenario;
在驾驶场景中添加一条直路。这条路的每个方向都有一条车道。
道路中心= [0 0;70 0 0];lanspec = lanespec([1 1]);路(场景、roadCenters“道”, laneSpecification);
在驾驶场景中添加一辆自我汽车。
egoVehicle =车辆(场景中,“ClassID”,1,“网”, driving.scenario.carMesh);路径点= [1 -2 0;35 2 0];smoothTrajectory (egoVehicle锚点10);
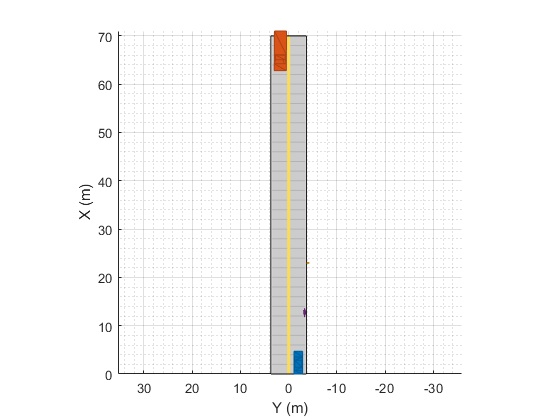
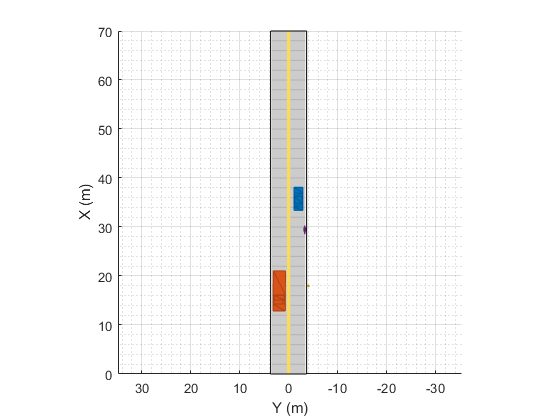
在驾驶场景中添加卡车、行人和自行车,并绘制场景。
卡车=车辆(场景中,“ClassID”2,“长度”, 8.2,“宽度”, 2.5,“高度”, 3.5,...“网”, driving.scenario.truckMesh);路径点= [70 1.7 0;20 1.9 0];smoothTrajectory(卡车,锚点,15);行人=演员(场景中,“ClassID”4“长度”, 0.24,“宽度”, 0.45,“高度”, 1.7,...“网”, driving.scenario.pedestrianMesh);路径点= [23 -4 0;10.4 - 4 0);smoothTrajectory(行人,锚点,1.5);自行车=演员(场景中,“ClassID”,3,“长度”, 1.7,“宽度”, 0.45,“高度”, 1.7,...“网”, driving.scenario.bicycleMesh);路径点= [12.7 -3.3 0;49.3 - -3.3 0);smoothTrajectory(自行车、锚点、5);情节(场景中,“网格”,“上”)
生成和绘制激光雷达点云数据
创建一个lidarPointCloudGenerator系统对象。
激光雷达= lidarPointCloudGenerator;
将参与者概要文件和ego车辆参与者ID从驾驶场景添加到System对象。
激光雷达。ActorProfiles = ActorProfiles(场景);激光雷达。EgoVehicleActorID = egoVehicle.ActorID;
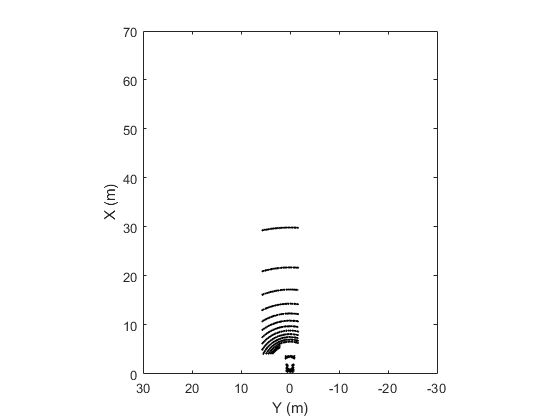
绘制点云数据。
cep = birdsEyePlot (“Xlimits”70年[0],“YLimits”[-30] 30日);绘图机= pointCloudPlotter (cep);传奇(“关闭”);而advance(scenario) tgts = targetpose (egoVehicle);rdmesh = roadMesh (egoVehicle);[ptCloud, isValidTime] =激光雷达(tgt, rdmesh scenario.SimulationTime);如果isValidTime plotPointCloud(绘图仪,ptCloud);结束结束
输入参数
介绍了R2020a
你也可以从以下列表中选择一个网站:
