扩展卡尔曼滤波器
当您使用过滤器跟踪对象时,您将使用一系列检测或测量来估计状态一个物体的运动模型。在运动模型中,状态是表示物体状态的量的集合,例如它的位置、速度和加速度。使用扩展卡尔曼滤波器(trackingEKF)当物体运动遵循非线性状态方程或当测量是状态的非线性函数时。例如,考虑使用扩展卡尔曼滤波器,当目标的测量值用球坐标表示时,如方位角、仰角和距离,但目标的状态用笛卡尔坐标表示。
在对状态方程和测量方程进行线性化的基础上,提出了扩展卡尔曼方程。线性化使您能够以近似线性的格式传播状态和状态协方差,并且需要状态方程和测量方程的雅可比矩阵。
请注意
如果你的估计系统是线性的,你可以使用线性卡尔曼滤波器(trackingKF)或扩展卡尔曼滤波器(trackingEKF)来估计目标状态。如果你的系统是非线性的,你应该使用非线性滤波器,如扩展卡尔曼滤波器或无气味卡尔曼滤波器(trackingUKF).
状态更新模型
假设预测状态的封闭形式表达式是前一个状态的函数xk、控制uk、噪音wk,和时间t.
预测状态相对于前一状态的雅可比矩阵由偏导数得到:
预测状态对噪声的雅可比矩阵为:
当噪声是状态更新方程中的加法时,这些函数的形式更简单:
在这种情况下,F(w)是单位矩阵。
可以指定状态雅可比矩阵StateTransitionJacobianFcn的属性trackingEKF对象。如果不指定此属性,对象将使用数值差分计算雅可比矩阵,这种方法精度稍低,并且会增加计算时间。
度量模型
在扩展的卡尔曼滤波器中,测量也可以是状态和测量噪声的非线性函数。
测量关于状态的雅可比矩阵为:
测量值对测量噪声的雅可比矩阵为:
当噪声是测量方程中的加法时,这些函数的形式更简单:
在这种情况下,H(v)是单位矩阵。
在trackingEKF,您可以指定测量雅可比矩阵使用MeasurementJacobianFcn财产。如果不指定此属性,对象将使用数值差分计算雅可比矩阵,这种方法精度稍低,并且会增加计算时间。
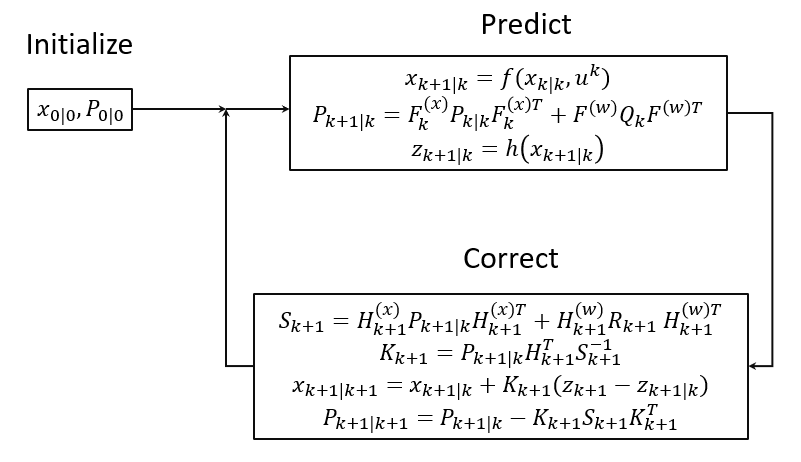
扩展卡尔曼滤波回路
扩展的卡尔曼滤波环路与的环路几乎相同线性卡尔曼滤波器除了:
该滤波器尽可能使用精确的非线性状态更新和测量函数。
状态雅可比矩阵替换了状态转换矩阵。
测量雅可比矩阵代替测量矩阵。
预定义扩展卡尔曼滤波函数
工具箱提供了预定义的状态更新和测量功能trackingEKF.
| 运动模型 | 函数名 | 函数的目的 | 状态表示 |
|---|---|---|---|
| 恒定的速度 | constvel |
等速状态更新模型 |
在哪里
|
constveljac |
等速状态更新雅可比矩阵 | ||
cvmeas |
等速测量模型 | ||
cvmeasjac |
等速测量雅可比矩阵 | ||
| 恒定的加速度 | constacc |
恒定加速度状态更新模型 |
在哪里
|
constaccjac |
恒定加速度状态更新雅可比矩阵 | ||
cameas |
恒加速度测量模型 | ||
cameasjac |
恒定加速度测量雅可比矩阵 | ||
| 恒定转速 | constturn |
恒定转换率状态更新模型 |
在哪里 |
constturnjac |
恒定的转速率状态更新雅可比矩阵 | ||
ctmeas |
恒定转换率测量模型 | ||
ctmeasjac |
恒定回转速率测量雅可比矩阵 |
示例:使用角度和距离测量来估计2-D目标状态trackingEKF
初始估计模型
假设一个目标以以下初始位置和速度在2D中移动。模拟持续20秒,采样时间为0.2秒。
rng (2022);%用于可重复的结果Dt = 0.2;%秒simTime = 20;%秒tspan = 0:dt:simTime;trueInitialState = [30;1;40;1);% (x, vx; y; v)initialCovariance = diag([100,1e3,100,1e3]);processNoise = diag([0;. 01;0;. 01]);过程噪声矩阵
假设测量值是相对于正x方向的方位角和从原点到目标的距离。测量噪声协方差矩阵为:
measureNoise = diag([2e-6;1]);测量噪声矩阵。单位是m²和rad²。
预分配保存结果的变量。
numSteps =长度(tspan);trueStates = NaN(4,numSteps);trueStates(:,1) = trueInitialState;estimateStates = NaN(大小(trueStates));测量= NaN(2,numSteps);
获得真实状态和测量值
传播恒定速度模型并产生带噪声的测量值。
为I = 2:长度(tspan)如果i ~= 1 trueStates(:,i) = stateModel(trueStates(:,i-1),dt) + sqrt(processNoise)*randn(4,1);结束measurements(:,i) = measureModel(trueStates(:,i)) + sqrt(measureNoise)*randn(2,1);结束
画出真实的轨迹和测量值。
图(1)情节(trueStates (1, 1), trueStates (3,1),“r *”DisplayName =“最初的真理”)举行在情节(trueStates (1:), trueStates (3:)“r”DisplayName =“真正的轨迹”)包含(“x”(m)) ylabel (“y (m)”)标题(“真正的轨迹”)轴广场
![]()
图(2)subplot(2,1,1) plot(tspan,measurements(1,:)*180/pi) xlabel(“时间(s)”) ylabel (“角(度))标题(“角度与范围”) subplot(2,1,2) plot(tspan,measurements(2,:)) xlabel(“时间(s)”) ylabel (“范围(m)”)
![]()
初始化扩展卡尔曼滤波器
用初始状态估计值初始化过滤器[35;0;45;0].
filter = trackingEKF(State=[35;0;45;0], StateCovariance = initialCovariance,...StateTransitionFcn = @stateModel ProcessNoise = ProcessNoise,...MeasurementFcn = @measureModel MeasurementNoise = measureNoise);estimateStates(:,1) = filter.State;
运行扩展卡尔曼滤波器并显示结果
方法来运行筛选器预测而且正确的对象的功能。
为我= 2:长度(tspan)预测(过滤器,dt);estimateStates(:,i) =正确的(过滤器,测量(:,i));结束图(1)情节(estimateStates (1, 1), estimateStates (3,1),“g *”DisplayName =“初步估计”)情节(estimateStates (1:), estimateStates (3:)“g”DisplayName =“估计轨迹”传奇(位置=“西北”)标题(“真实轨迹vs估计轨迹”)
![]()
辅助函数
stateModel模拟了无过程噪声的匀速运动。
函数stateNext = stateModel(state,dt) F = [1 dt 0 0;0 1 0 0;0 0 1 dt;0 0 0 1];stateNext = F*状态;结束
meausreModel模型范围和方位角测量无噪声。
函数z = measureModel(state) angle = atan(state(3)/state(1));Range = norm([state(1) state(3)]);Z =[角度;范围];结束
另请参阅
您也可以从以下列表中选择一个网站: