情节
创建驾驶场景
语法
描述
例子
创建和显示道路边界
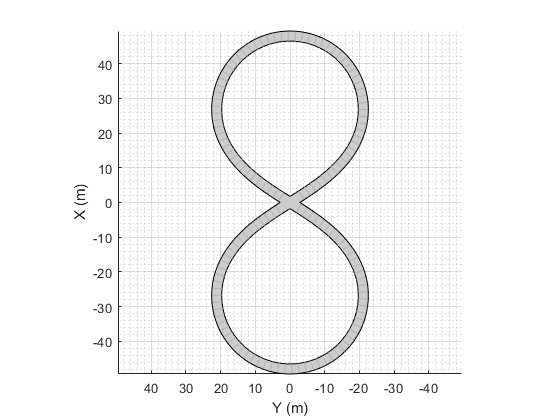
创建一个包含在方案中的世界坐标指定的8字形道路行驶的情况。转换场景的世界坐标自身车辆的坐标系。
创建一个空的驾驶场景。
场景= drivingScenario;
添加数字8的道路场景。显示的情况。
roadCenters = [0 0 1 20 1 -20 20 20 -20 1 -20 1 -20 20 1 0 0 1];roadWidth = 3;bankAngle = [0 15 15 -15 -15 0];路(场景,roadCenters,roadWidth,bankAngle);图(方案)
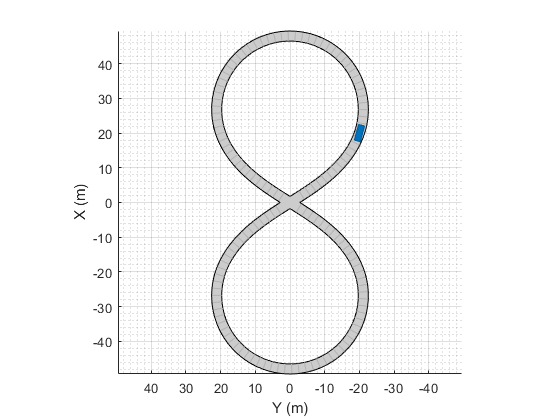
在场景中添加一个自我载体。将车辆定位在世界坐标(20,-20)并以-15度偏航角定位。
自我=演员(场景中,“ClassID”1,'位置'[20 -20 0],“偏航”, -15);
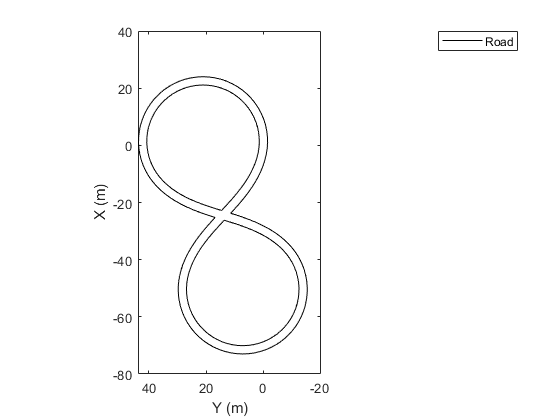
在自我车辆坐标中使用roadBoundaries函数。指定自身车辆作为输入自变量。
rbEgo1 = roadBoundaries(EGO);
显示器上的鸟瞰图中的结果。
BEP = birdsEyePlot;LBP = laneBoundaryPlotter(BEP,“DisplayName的”,“路”);plotLaneBoundary(LBP,rbEgo1)
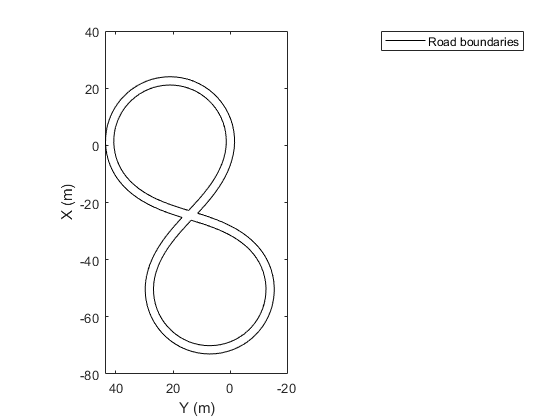
通过使用获得世界坐标中的道路边界roadBoundaries函数。指定场景作为输入参数。
rbScenario = roadBoundaries(场景);
在自我车辆坐标中使用driving.scenario.roadBoundariesToEgo函数。
rbEgo2 = driving.scenario.roadBoundariesToEgo(rbScenario,自我);
在鸟瞰图上显示道路边界。
BEP = birdsEyePlot;LBP = laneBoundaryPlotter(BEP,“DisplayName的”,“道路边界”);plotLaneBoundary(LBP,{rbEgo2})
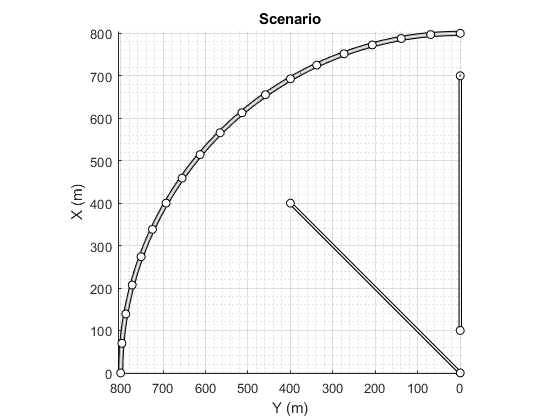
创建有多个角色和道路的驾驶场景
创建一个包含一个弯曲的道路,两个笔直的道路和两个演员的驾驶场景:一辆汽车和一辆自行车。两位演员沿着马路移动了60秒。
创建driving scenario对象。
场景= drivingScenario (“SampleTime”0.1”,“StopTime”、60);
使用道路中心点沿着半径800米的圆弧创建弯曲的道路。弧从0度开始,在90度结束,并以5度的增量进行采样。
ang = [0:5:90] ';R = 800;[cosd(angs) sind(angs) 0 (size(angs))];roadwidth = 10;路(场景、roadcenters roadwidth);
添加两个直路与默认宽度,在每一端使用道路中心点。
roadcenters = [700 0 0;100 0 0];路(场景,roadcenters)
RoadID: 2路中心:[2x3双]路宽:6折角:[2x1双]
roadcenters = [400 400 0;0 0 0];路(场景,roadcenters)
ANS =具有属性道:名称: “” RoadID:3个RoadCenters:[2×3双] RoadWidth:6 BankAngle:[2×1双]
获取道路边界。
rbdry = roadBoundaries(场景);
在场景中添加一辆汽车和一辆自行车。把车停在第一条直路的起点。
车=车辆(场景中,“ClassID”1,'位置'(700 0 0),…'长度',3,'宽度',2,'高度', 1.6);
把自行车沿着路往前放。
自行车=演员(场景中,“ClassID”,3,'位置', (706 376 0) ',…'长度',2,'宽度',0.45,'高度',1.5);
画出场景。
图(场景,“中心线”,“上”,'RoadCenters',“上”);标题(“方案”);
展示演员的姿势和侧面。
姿势= actorPoses(场景)
提出了=带字段的2×1结构数组:横摇、俯仰、偏航、角速度
概要文件= actorProfiles(场景)
型材=带字段的2×1结构数组:ActorID分类长度,宽度,高度,原始偏移MeshVertices, MeshFaces, rspattern, RCSAzimuthAngles, RCSElevationAngles
输入参数
提示
要旋转任何图形,请在“图形”窗口中选择视图>相机工具栏。
介绍了R2017a
您还可以选择从下面的列表中的网站:
