actorPoses
Positions, velocities, and orientations of actors in driving scenario
Syntax
Description
Examples
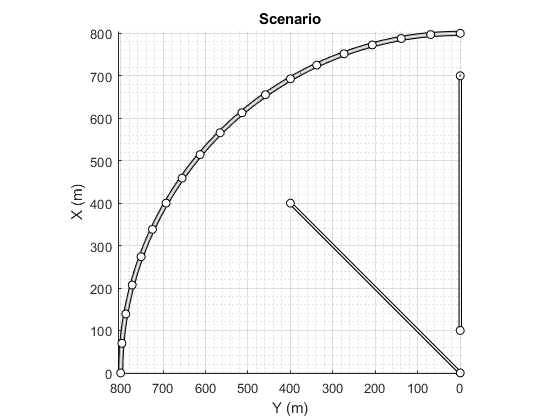
Create Driving Scenario with Multiple Actors and Roads
Create a driving scenario containing a curved road, two straight roads, and two actors: a car and a bicycle. Both actors move along the road for 60 seconds.
Create the driving scenario object.
scenario = drivingScenario('SampleTime',0.1','StopTime',60);
Create the curved road using road center points following the arc of a circle with an 800-meter radius. The arc starts at 0°, ends at 90°, and is sampled at 5° increments.
angs = [0:5:90]'; R = 800; roadcenters = R*[cosd(angs) sind(angs) zeros(size(angs))]; roadwidth = 10; road(scenario,roadcenters,roadwidth);
使用两端的道路中心点添加两条默认宽度的直线道路。
Roadcenters = [700 0 0;100 0 0];路(场景,公路中心)
ans = Road with properties: Name: "" RoadID: 2 RoadCenters: [2x3 double] RoadWidth: 6 BankAngle: [2x1 double]
Roadcenters = [400 400 0;0 0 0];路(场景,公路中心)
ANS =带有财产的道路:名称:“” ROADID:3 Roadcenters:[2x3 double] Roadwidth:6 Bankangle:[2x1 double]
获得道路界限。
rbdry = Roadbouldaries(方案);
Add a car and a bicycle to the scenario. Position the car at the beginning of the first straight road.
car = vehicle(scenario,'ClassID',1,'位置',[700 0 0],...'长度',3,'Width',2,'高度',1.6);
Position the bicycle farther down the road.
bicycle = actor(scenario,'ClassID',3,'位置',[706 376 0]',...'长度',2,'Width',0.45,'高度',1.5);
Plot the scenario.
plot(scenario,'Centerline','on',“公路中心”,'on');标题('设想');
Display the actor poses and profiles.
姿势= actorposes(场景)
poses=2×1 struct array with fields:ActorID Position Velocity Roll Pitch Yaw AngularVelocity
profiles = actorProfiles(scenario)
profiles=2×1 struct array with fields:ActorID ClassID Length Width Height OriginOffset MeshVertices MeshFaces RCSPattern RCSAzimuthAngles RCSElevationAngles
Input Arguments
Output Arguments
See Also
Objects
Functions
Select a Web Site
Choose a web site to get translated content where available and see local events and offers. Based on your location, we recommend that you select:.
Selectweb site您还可以从以下列表中选择一个网站:
Americas
- AméricaLatina(Español)
- Canada(English)
- United States(English)
欧洲
- Belgium(English)
- 丹麦(English)
- Deutschland(德意志)
- España(Español)
- Finland(English)
- 法国(Français)
- 爱尔兰(English)
- Italia(Italiano)
- Luxembourg(English)
- Netherlands(English)
- 挪威(English)
- Österreich(德意志)
- Portugal(English)
- Sweden(English)
- Switzerland
- United Kingdom(English)
