lidarPointCloudGenerator
生成用于驾驶场景的激光雷达点云数据
描述
的lidarPointCloudGenerator系统对象™从安装在自我车辆上的激光雷达传感器产生检测。所有的检测都参考了自我车辆或车载传感器的坐标系统。您可以使用lidarPointCloudGenerator对象中包含参与者和轨迹的场景,您可以使用drivingScenario对象。使用统计传感器模型,lidarPointCloudGenerator对象可以模拟添加随机噪声的真实检测。
生成激光雷达点云:
创建
lidarPointCloudGenerator对象并设置其属性。使用参数调用对象,就像调用函数一样。
有关系统对象如何工作的详细信息,请参见什么是系统对象?.
创建
属性
使用
语法
描述
输入参数
输出参数
对象的功能
要使用对象函数,请将System对象指定为第一个输入参数。例如,释放system对象的系统资源obj,使用这种语法:
发行版(obj)
例子
生成多角色激光雷达点云数据
生成具有多个参与者的驾驶场景的激光雷达点云数据lidarPointCloudGenerator系统对象。通过使用创建驾驶场景drivingScenario对象。它包含一辆自我车、行人和另外两辆车。
创建并绘制有多辆车的驾驶场景
创建一个驾驶场景。
scenario = drivingScenario;
在驾驶场景中添加一条笔直的道路。这条路每个方向都有一条车道。
roadCenters = [0 0 0;70 0 0];lanspecification = lanespec([1 1]);路(场景、roadCenters“道”, laneSpecification);
在驾驶场景中添加一辆自我车辆。
egoVehicle =车辆(场景,“ClassID”, 1“网”, driving.scenario.carMesh);路径点= [1 -2 0;35 -2 0];轨迹(egoVehicle锚点10);
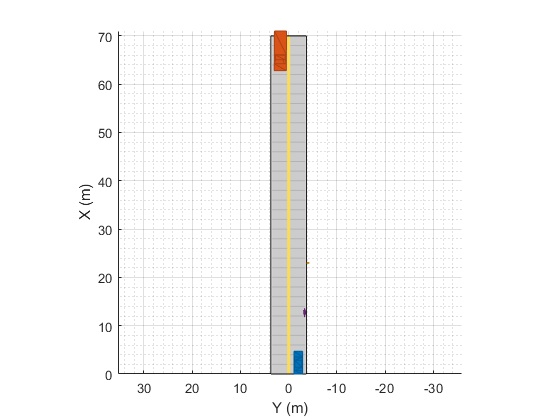
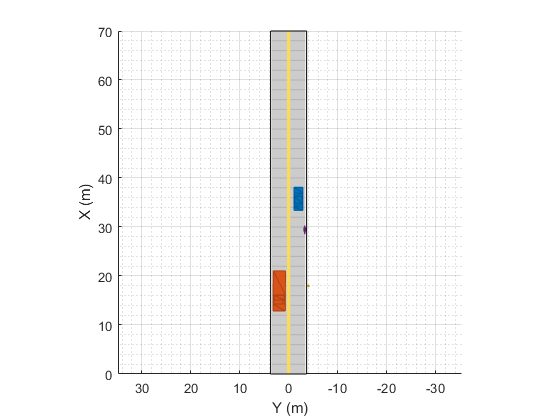
在驾驶场景中添加卡车、行人和自行车,并绘制场景。
卡车=车辆(场景,“ClassID”2,“长度”, 8.2,“宽度”, 2.5,“高度”, 3.5,...“网”, driving.scenario.truckMesh);路点= [70 1.7 0;20 1.9 0];轨迹(卡车,锚点,15);行人=演员(场景,“ClassID”4“长度”, 0.24,“宽度”, 0.45,“高度”, 1.7,...“网”, driving.scenario.pedestrianMesh);路点= [23 -4 0;10.4 -4 0];轨迹(行人,锚点,1.5);自行车=演员(场景,“ClassID”3,“长度”, 1.7,“宽度”, 0.45,“高度”, 1.7,...“网”, driving.scenario.bicycleMesh);路点= [12.7 -3.3 0;49.3 -3.3 0];轨迹(自行车、锚点、5);情节(场景中,“网格”,“上”)
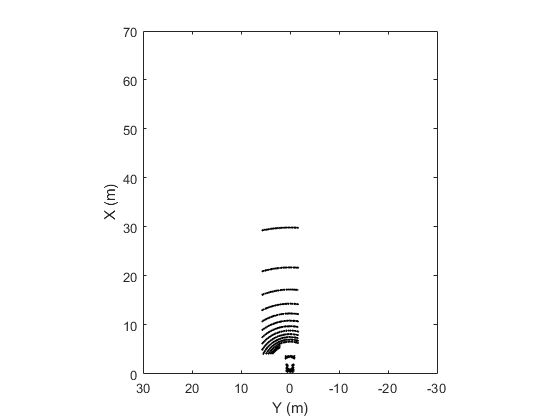
生成并绘制激光雷达点云数据
创建一个lidarPointCloudGenerator系统对象。
lidar = lidarPointCloudGenerator;
将参与者配置文件和自我车辆参与者ID从驾驶场景添加到System对象。
激光雷达。ActorProfiles = ActorProfiles(场景);激光雷达。EgoVehicleActorID = egoVehicle.ActorID;
绘制点云数据。
bep = birdsEyePlot(“Xlimits”70年[0],“YLimits”[-30] 30日);绘图仪= pointCloudPlotter(bep);传奇(“关闭”);而advance(scenario) tgts = targetpose (egoVehicle);rdmesh = roadMesh(egoVehicle);[ptCloud,isValidTime] = lidar(tgts,rdmesh,scenario.SimulationTime);如果isValidTime plotPointCloud(绘图仪,ptCloud);结束结束
另请参阅
对象
drivingScenario|extendedObjectMesh|laneMarking|lanespec|monoCamera|multiObjectTracker|objectDetection|radarDetectionGenerator|visionDetectionGenerator
功能
块
应用程序
R2020a中引入
您也可以从以下列表中选择一个网站:
