monoCamera
配置单眼照相机传感器
描述
该monoCamera对象保存关于单目摄像机传感器配置的信息。配置信息包括摄像机的内部特性、摄像机的外部特性(如其方向(如俯仰、偏航和横滚所述)和摄像机在车辆内的位置)。要估计相机的内部和外部参数,参见校准单眼相机。
对于摄像机捕获的图像,可以使用imageToVehicle和vehicleToImage的函数来转换图像坐标和车辆坐标之间的点位置。这些函数适用射影变换(单应性),这使你估计距离从安装在车辆上的摄像机来在平坦的路面的位置。
创建
属性
内部函数-内在相机参数
cameraIntrinsics宾语|cameraParameters宾语
本征相机参数,指定为acameraIntrinsics要么cameraParameters宾语。固有照相机参数包括焦距和照相机的光学中心,并且由摄像机产生的图像的大小。
当您创建对象,您可以设置该属性。创建对象后,此属性为只读。
高度-从路面高度相机传感器
真正的标量
高度从路面到相机传感器,指定为实数标量。的高度为从地面到摄像机的焦点的垂直距离。指定世界单位,如米的高度。为了估计这个值,使用estimateMonoCameraParameters函数。
沥青-螺旋角
真正的标量
车辆的水平面与摄像机的光轴之间的俯仰角,指定为以度为单位的实标量。为了估计这个值,使用estimateMonoCameraParameters函数。
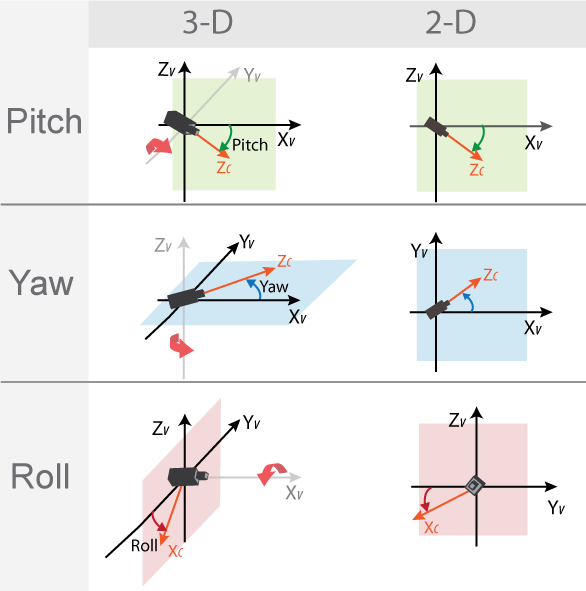
沥青在车辆的正方向看时使用的旋转ISO约定,以顺时针正角方向ÿV轴。
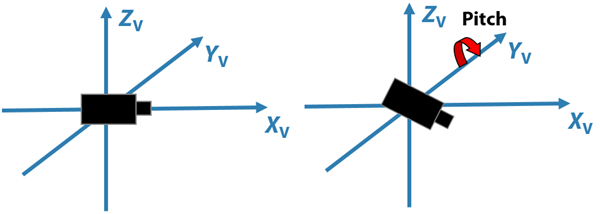
有关更多细节,请参见角方向。
偏航-偏航角
真正的标量
之间的偏航角XV车辆的轴和摄像机的光轴,指定为以度为单位的实标量。为了估计这个值,使用estimateMonoCameraParameters函数。
偏航在车辆的正方向看时使用的旋转ISO约定,以顺时针正角方向žV轴。
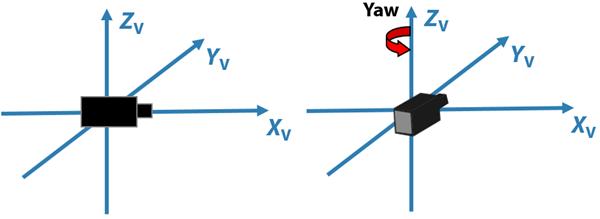
有关更多细节,请参见角方向。
滚-横摇角
真正的标量
围绕其光轴的摄像机的滚转角,返回作为在度的实数标量。为了估计这个值,使用estimateMonoCameraParameters函数。
滚在车辆的正方向看时使用的旋转ISO约定,以顺时针正角方向XV轴。
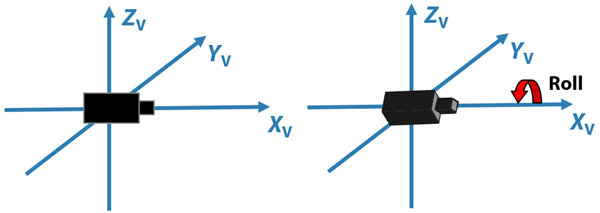
有关更多细节,请参见角方向。
SensorLocation-相机传感器的中心的位置
[0 0](默认)|二元素矢量
相机传感器的中心的位置,指定为以下形式的两个元素的矢量[Xÿ]。使用此属性来改变相机的位置。单元是在车辆坐标系中的(XV,ÿV,žV)。
默认情况下,相机传感器位于(XV,ÿV)原点,在由指定的高度高度。
WorldUnits-世界坐标系单位
“米”|特征向量|串标
世界坐标系单位,指定为矢量字符或字符串标量。此属性只存储单元类型,并且不影响任何计算。任何文本是有效的。
当您创建对象,您可以设置该属性。创建对象后,此属性为只读。
对象的功能
imageToVehicle |
转换图像坐标到车辆坐标 |
vehicleToImage |
将车辆坐标转换为图像坐标 |
例子
创建单目对象
创建一个向前的单目摄像头传感器安装在一个自我的车辆。检查从摄像机捕获的图像,并确定图像中车辆和图像坐标中的位置。
设置相机的固有参数。指定焦距、像平面的主点和输出图像的大小。单位是像素。将intrinsic保存为acameraIntrinsics宾语。
长焦点= [800 800]。principalPoint = [320 240]。IMAGESIZE = [480 640]。内在= cameraIntrinsics(长焦点,principalPoint,IMAGESIZE);
指定摄像机的位置。相机具有14度间距朝向地面位置2.18米在地面上方。
身高= 2.18;距= 14;
定义一个单眼照相机传感器利用固有照相机参数和照相机的位置。从照相机加载图像。
传感器= monoCamera(内在,高度,'沥青'、沥青);Ioriginal = imread ('road.png');图imshow(Ioriginal)标题(原始图像的)

确定相机正前方10米处的图像坐标。该X-轴点向前从相机和ÿ-轴指向左侧。
xyVehicleLoc1 = [10 0];xyVehicleLoc1 xyImageLoc1 = vehicleToImage(传感器)
xyImageLoc1 =1×2320.0000 216.2296
显示的图像上的点。
IvehicleToImage = insertMarker(Ioriginal,xyImageLoc1);IvehicleToImage = insertText(IvehicleToImage,xyImageLoc1 + 5,10米的);图imshow(IvehicleToImage)标题(“车辆对图像点”)

判断一个点位于图像在路面上的车辆坐标。
xyImageLoc2 = [300 300];xyImageLoc2 xyVehicleLoc2 = imageToVehicle(传感器)
xyVehicleLoc2 =1×26.5959 - 0.1732
该点位于车辆前方约6.6米处,车辆中心左侧约0.17米处。
在图像上显示该点的车辆坐标。
IimageToVehicle = insertMarker(Ioriginal,xyImageLoc2);displayText = sprintf的('(%.2f米,%.2f米)',xyVehicleLoc2);IimageToVehicle = insertText(IimageToVehicle,xyImageLoc2 + 5,displayText);图imshow(IimageToVehicle)标题(“Image-to-Vehicle点”)

从生成单目视觉检测项
通过使用单眼照相机配置创建视觉传感器,并产生从该传感器检测。
指定摄像机的内部参数,并创建一个monoCamera从这些参数对象。相机以1.5米地面上方的高度和1种朝向地面程度的间距被安装在自主车辆的顶部。
长焦点= [800 800]。principalPoint = [320 240]。IMAGESIZE = [480 640]。内在= cameraIntrinsics(长焦点,principalPoint,IMAGESIZE);高度= 1.5;节距= 1;monoCamConfig = monoCamera(内在,高度,'沥青'、沥青);
创建使用单眼相机配置的视觉检测发电机。
visionSensor = visionDetectionGenerator (monoCamConfig);
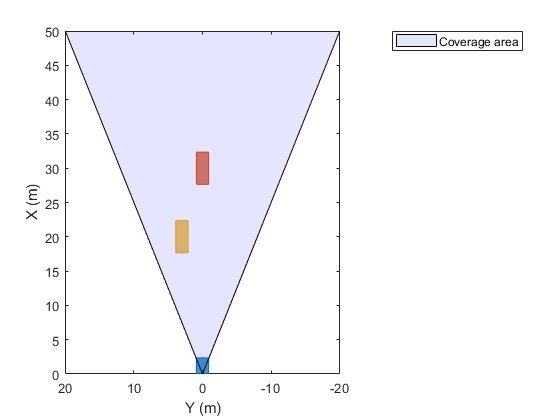
生成具有自主车辆和两个目标汽车的驱动方案。第一目标汽车在自身车辆正前方30米定位。第二目标轿厢位置20米的自车辆的前面,但通过3米向左侧偏离。
场景= drivingScenario;egoVehicle =车辆(场景);targetCar1 =车辆(场景中,'位置'[30 0 0]);targetCar2 =车辆(场景中,'位置'[20 3 0]);
使用鸟瞰图来显示车辆轮廓和传感器覆盖区域。
图BEP = birdsEyePlot('XLIM',[0 50],'YLim',[ - 20 20]);olPlotter = outlinePlotter(BEP);[位置,偏航,长度,宽度,originOffset,颜色] = targetOutlines(egoVehicle);plotOutline(olPlotter,位置,偏航,长度,宽度);caPlotter = coverageAreaPlotter(BEP,'显示名称','覆盖区域',“FaceColor”,“蓝”);plotCoverageArea(caPlotter,visionSensor.SensorLocation,visionSensor.MaxRange,...visionSensor.Yaw visionSensor.FieldOfView (1))
从自身车辆的角度获得目标车的姿势。使用这些姿势以产生从传感器检测。
姿势= targetPoses(egoVehicle);[dets的,numValidDets] = visionSensor(姿势,scenario.SimulationTime);
显示(X,ÿ有效检测的)位置。对于每个检测中,(X,ÿ)的前两个值测量领域。
为I = 1:numValidDets XY = dets的{I} .Measurement(1:2);detXY = sprintf的('检测%d:X =%.2f米,Y =%.2f米',I,XY);DISP(detXY)结束
检测1:X =19.09米,Y =2.79米检测2:X =27.81米,Y =0.08米
更多关于
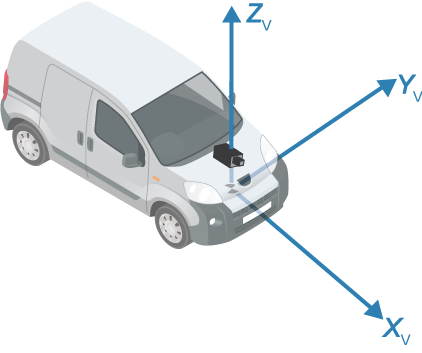
车辆坐标系
另外,在车辆坐标系(XV,ÿV,žV)定义为monoCamera:
该XV-轴指向车辆前方。
该ÿV- 轴指向左边,因为朝前时查看。
该žV从地面 - 轴点可达维持右手坐标系。
这个坐标系统的默认原点是在路面上,正下方的摄影机中心。摄像机的焦点定义该中心点。
要更改车辆内的原点的位置坐标系,更新SensorLocation属性。
有关车辆坐标系统的详细信息,请参阅坐标系统在自动驾驶的工具箱。
角方向
单目相机传感器在观察的正方向时,采用顺时针正角度方向ž- , -ÿ- 和X-axes,分别。
兼容性注意事项
扩展功能
也可以看看
应用
功能
对象
介绍了在R2017a
您还可以选择从下面的列表中的网站:
