主要内容
plotBarrierOutline
在鸟瞰图上显示屏障轮廓
描述
plotBarrierOutline (在鸟瞰图上显示障碍物的矩形轮廓。指定障碍物,以及位置,旋转的偏航角度,长度和每个障碍物段的宽度。大纲绘图仪olPlotter,barrierSegments,职位,偏航,长度,宽度)olPlotter,与a有关birdsEyePlot对象,并配置指定轮廓的显示。
删除与大纲绘图仪相关的所有大纲olPlotter,可以使用clearData功能和指定olPlotter作为输入参数。
要显示驾驶场景中障碍的轮廓,请先使用targetOutlines与“障碍”标记作为输入,以获得屏障的尺寸。然后,使用plotBarrierOutline函数以鸟瞰图的形式显示所有障碍物的轮廓。
plotBarrierOutline (___,使用一个或多个指定选项名称,值)名称,值对参数和前面语法中的输入参数进行配对。
例子
鸟眼图上目标的图轮廓
创建一个驾驶场景。创建一个25米的路段,在其左侧边缘有一个屏障。增加行人以1m /s的速度穿过马路,车辆以10m /s的速度沿着马路行驶。
场景= drivingScenario;R =路(场景,[0 0 0;25日0 0]);障碍(场景中,r,“RoadEdge”,“左”) p = actor(场景,“ClassID”4“长度”, 0.2,“宽度”, 0.4,“高度”, 1.7);v =车辆(场景中,“ClassID”1);smoothTrajectory (p [15 3 0;15 30 0],1)平滑轨迹(v,[v.]RearOverhang 0 0;25-v.Length + v。RearOverhang 0 0], 10)
用追逐情节从车辆的角度来展示场景。
chasePlot (v,“中心线”,“上”)

创建一个鸟瞰图,轮廓绘图仪,和车道边界绘图仪。
cep = birdsEyePlot (“XLim”25 [-25],“YLim”, -10年[10]);olPlotter = outlinePlotter (cep);lbPlotter = laneBoundaryPlotter (cep);传奇(“关闭”)
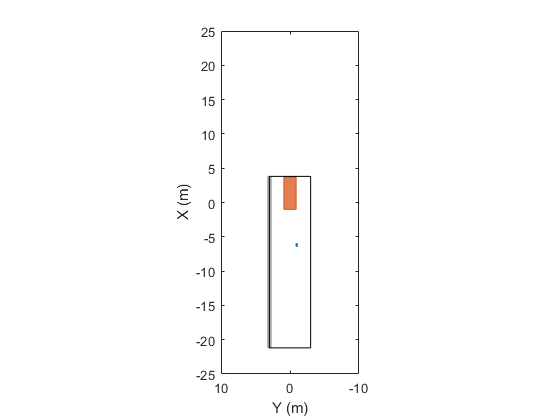
运行模拟循环。用目标的大纲更新绘图仪。
而推进(场景)%获取道路边界和矩形轮廓。rb = roadBoundaries (v);(位置、偏航、长度、宽度、originOffset color] = targetOutlines (v);[bposition, byaw blength、bwidth boriginOffset, bcolor, numBarrierSegments] = targetOutlines (v,“障碍”);%更新鸟瞰图中的道路、角色和障碍物。plotLaneBoundary (lbPlotter, rb);plotOutline (olPlotter、位置、偏航、长度、宽度、...“OriginOffset”originOffset,“颜色”、颜色);plotBarrierOutline (olPlotter、numBarrierSegments bposition、byaw blength, bwidth,...“OriginOffset”boriginOffset,“颜色”, bcolor);允许plot更新时间。暂停(0.01)结束
输入参数
介绍了R2021a
你也可以从以下列表中选择一个网站:
