getCosts
在车辆成本图中获取电池的成本值
描述
例子
获取成本矩阵并设置成本值
创建一个5×10米的车辆成本地图。细胞的边长是1,世界单位是米。设置通货膨胀半径为1。绘制成本图,得到默认的成本矩阵。
costmap = vehicleCostmap (5、10);costmap.CollisionChecker。InflationRadius = 1;情节(costmap)标题(“默认Costmap”)

getCosts (costmap)
ans =10×50.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250 0.4250
通过增加单元格的成本在(x,y)坐标(3,4)处标记一个障碍。
setcost (costmap [3,4], 0.8);情节(costmap)标题(在(3,4)处有障碍物的成本图)
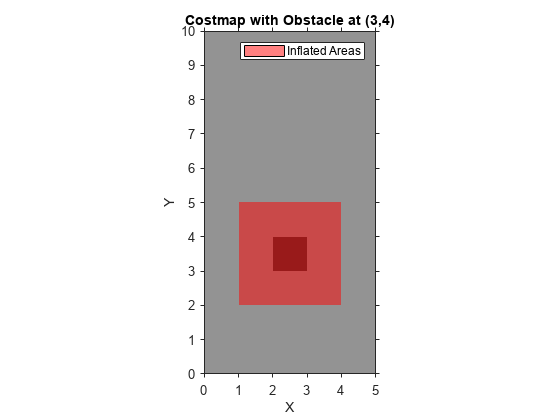
获取三个单元格的成本:带有障碍物的单元格、与障碍物相邻的单元格和位于障碍物充气半径之外的单元格。
costVal = getCosts(costmap,[3 4;2 4;4 7])
costVal =3×10.8000 0.4250 0.4250
虽然costmap的plot以红色阴影显示带有障碍物的cell及其相邻的cell,但是只有带有障碍物的cell的成本值更高,为0.8。其他单元格的默认成本值仍然是0.425。
输入参数
输出参数
扩展功能
另请参阅
介绍了R2018a
你也可以从以下列表中选择一个网站:
