主要内容
allanvar
艾伦差异
句法
描述
Allan方差用于测量时域中的一系列数据振荡的频率稳定性。它还可以用于确定系统中的内在噪声作为平均时间的函数。平均时间序列τ可以指定为τ=m/FS.。这里FS.是数据的采样频率,和m是一个上升平均因子的列表(例如1,2,4,8,......)。
例子
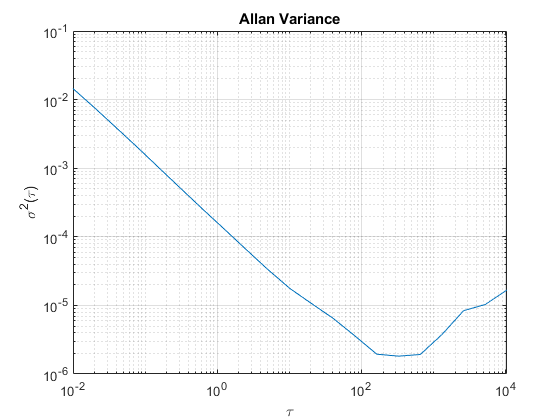
确定单轴陀螺仪的艾伦方差
从遥控器中加载陀螺数据,包括Hz中数据的采样率。计算Allan方差。
加载('LoggedingingLeaxisgroscope'那'omega'那'FS')[Avar,Tau] = Allanvar(Omega,'octave',fs);
绘制Allan方差loglog.阴谋。
loglog(tau,avar)xlabel(“\τ”) ylabel ('\ sigma ^ 2(\ tau)') 标题('Allan variance') 网格在
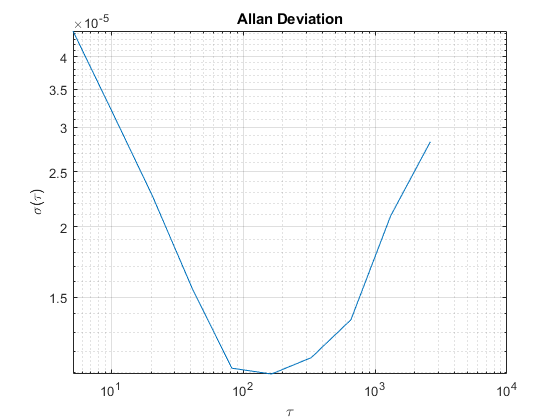
确定特定值的Allan偏差
产生样本陀螺噪声,包括角度随机步行和速率随机步行。
numsamples = 1e6;FS = 100;nstd = 1e-3;KSTD = 1E-7;nnoise = nstd。* randn(numsamples,1);Knoise = Kstd。* Cumsum(Randn(Numsamples,1));欧米茄= nnoise + knoise;
计算特定值的Allan偏差 。Allan偏差是Allan方差的平方根。
m = 2。^(9:18);[Avar,Tau] = Allanvar(Omega,M,FS);adev = sqrt(avar);
绘制Allan偏差loglog.阴谋。
Loglog(Tau,ADEV)XLabel(“\τ”) ylabel ('\ sigma(\ tau)') 标题('Allan偏差') 网格在
输入参数
输出参数
也可以看看
在R2019A介绍
你也可以从以下列表中选择一个网站: