altimeterSensor
描述
的altimeterSensor系统对象™模型从高度计传感器接收数据。
模型一个测高计:
创建
altimeterSensor对象并设置其属性。调用对象的参数,就好像它是一个函数。
了解更多关于系统对象是如何工作的,看到的系统对象是什么?
创建
描述
测高计= altimeterSensoraltimeterSensor系统对象,模拟高度计读数。
测高计= altimeterSensor (“ReferenceFrame”,射频)altimeterSensor系统对象,模拟高度计数据相对于参考系射频。指定射频作为NED的(North-East-Down)或“ENU表示”(East-North-Up)。默认值是NED的。
测高计= altimeterSensor (___、名称、值)的名字到指定的价值。未指定的属性有默认值。
属性
对象的功能
使用一个目标函数,指定系统对象作为第一个输入参数。例如,释放系统资源的系统对象命名obj使用这个语法:
发行版(obj)
例子
从静止的输入生成嘈杂的测高计读数
创建一个altimeterSensor系统对象™接受高度计传感器数据模型。假设一个典型赫兹采样率和10分钟的模拟时间。集ConstantBias来0.01,NoiseDensity来0.05,BiasInstability来0.05,DecayFactor来0.5。
Fs = 1;时间= 60 * 10;numSamples = * Fs持续时间;高度计= altimeterSensor (“SampleRate”Fs,…“ConstantBias”,0.01,…“NoiseDensity”,0.05,…“BiasInstability”,0.05,…“DecayFactor”,0.5);truePosition = 0 (numSamples, 3);
调用测高计与指定的truePosition模型噪声高度计数据从一个固定的平台。
altimeterReadings =高度计(truePosition);
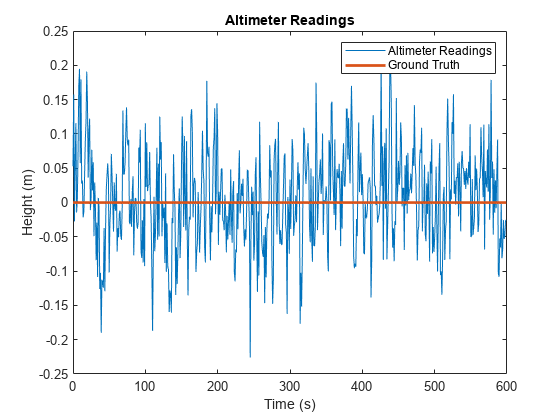
阴谋的真正位置和测高计传感器读数的高度。
t = (0: (numSamples-1)) / Fs;altimeterReadings情节(t)在情节(t, truePosition (:, 3),“线宽”,2)从标题(高度计数据的)包含(“时间(s)”)ylabel (身高(米)的)传说(高度计数据的,“地面实况”)
扩展功能
版本历史
介绍了R2019a