gpsSensor
GPS接收机仿真模型
描述
的gpsSensor系统对象™模型数据输出从全球定位系统(GPS)接收机。
GPS接收机模型:
创建
gpsSensor对象并设置其属性。调用对象的参数,就好像它是一个函数。
了解更多关于系统对象是如何工作的,看到的系统对象是什么?
创建
语法
描述
全球定位系统(GPS)= gpsSensorgpsSensor系统对象,计算一个全球定位系统接收器阅读基于本地输入信号的位置和速度。默认的参考位置在大地坐标系
纬度:0oN
经度:0oE
高度:0米
全球定位系统(GPS)= gpsSensor (“ReferenceFrame”,射频)gpsSensor系统对象,计算一个全球定位系统接收器阅读相对于参考系射频。指定射频作为NED的(North-East-Down)或“ENU表示”(East-North-Up)。默认值是NED的。
全球定位系统(GPS) = gpsSensor (___,每个属性集名称,值)的名字到指定的价值。未指定的属性有默认值。
属性
对象的功能
使用一个目标函数,指定系统对象作为第一个输入参数。例如,释放系统资源的系统对象命名obj使用这个语法:
发行版(obj)
例子
从静止的输入生成GPS定位测量
创建一个gpsSensor™系统对象模型的GPS接收器的数据。假设一个典型赫兹采样率和1000秒的模拟时间。定义的引用位置的经度,纬度,海拔(LLA)的纳蒂克,MA(美国)。传感器定义为固定与0通过指定的位置和速度。
fs = 1;时间= 1000;numSamples = * fs持续时间;refLoc = (42.2825 -71.343 53.0352);truePosition = 0 (numSamples, 3);trueVelocity = 0 (numSamples, 3);全球定位系统(gps) = gpsSensor (“SampleRate”fs,“ReferenceLocation”,refLoc);
调用全球定位系统(gps)与指定的truePosition和trueVelocity模拟接收GPS数据为一个固定的平台。
位置= gps (truePosition trueVelocity);
阴谋的真正位置和GPS传感器读数的位置。
t = (0: (numSamples-1)) / fs;次要情节(1,1)情节(t)的位置(:1),…t的(numSamples) * refLoc(1)标题(“GPS传感器读数”)ylabel (的纬度(度)次要情节(3、1、2)情节(t,位置(:,2),…t的(numSamples) * refLoc (2)) ylabel (的经度(度)次要情节(3,1,3)情节(t,位置(:,3),…t的(numSamples) * refLoc (3)) ylabel (的高度(米))包含(“时间(s)”)
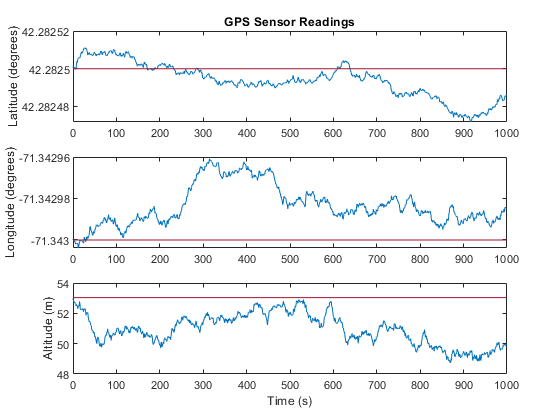
位置读数噪音控制HorizontalPositionAccuracy,VerticalPositionAccuracy,VelocityAccuracy,DecayFactor。的DecayFactor属性控制漂移噪声模型。默认情况下,DecayFactor被设置为0.999方法一个随机游走过程。观察的效果DecayFactor属性:
重置
全球定位系统(gps)对象。集
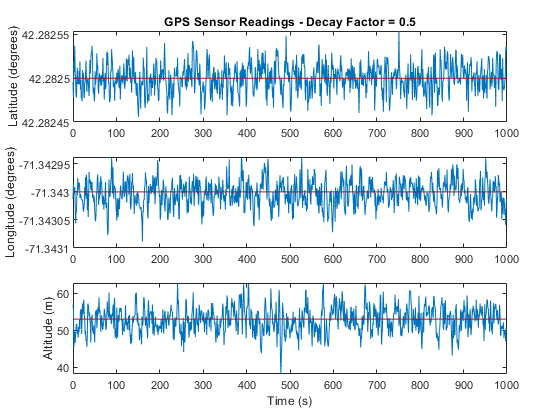
DecayFactor来0.5。调用
全球定位系统(gps)与变量指定一个固定位置。策划的结果。
的全球定位系统(GPS)现在位置读数振荡在正确的位置。
重置(gps) gps。DecayFactor= 0.5; position = gps(truePosition,trueVelocity); subplot(3, 1, 1) plot(t, position(:,1),…t的(numSamples) * refLoc(1)标题(“GPS传感器读数,衰减系数= 0.5”)ylabel (的纬度(度)次要情节(3、1、2)情节(t,位置(:,2),…t的(numSamples) * refLoc (2)) ylabel (的经度(度)次要情节(3,1,3)情节(t,位置(:,3),…t的(numSamples) * refLoc (3)) ylabel (的高度(米))包含(“时间(s)”)
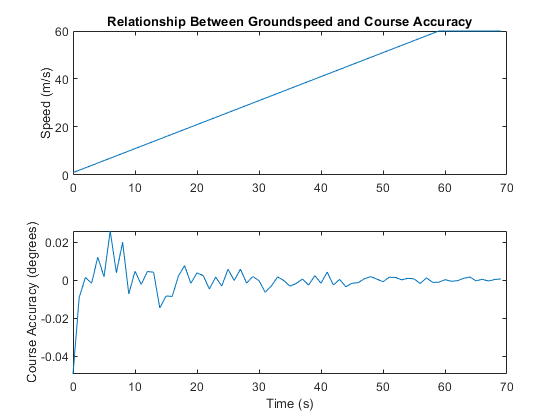
课程水平速度和精度之间的关系
GPS接收器实现更大的准确性随着水平增加。在本例中,您创建一个GPS接收机仿真对象和模拟接收到的数据从一个平台,加速从一个固定的位置。
创建一个默认的gpsSensor系统对象™模型数据返回的GPS接收器。
全球定位系统(GPS) = gpsSensor
GPS与属性= gpsSensor: SampleRate: 1 Hz PositionInputFormat:“当地”ReferenceLocation:[0 0 0][度度m] HorizontalPositionAccuracy: 1.6 m VerticalPositionAccuracy: 3 m VelocityAccuracy: 0.1 m / s RandomStream:“全球流”DecayFactor: 0.999
创建矩阵来描述一个平台的位置和速度NED坐标系统。平台从静止开始位置和加速到60 m / s东北部60秒,然后有一个垂直加速度2 m / s / 2秒,紧随其后的是一个2米/秒的速度爬8秒。假设一个恒定的速度,这样的速度是简单的导数的位置。
时间= 70;numSamples = * GPS.SampleRate持续时间;课程= 45 *的(持续时间,1);水平速度=[(一60);60 * 1 (1)];Nvelocity =水平。*信德(课程);Evelocity =水平。* cosd(课程);Dvelocity = [0 (60, 1); 1; 2 * 1 (9,1)];NEDvelocity = [Nvelocity、Evelocity Dvelocity];Ndistance = cumsum (Nvelocity);Edistance = cumsum (Evelocity); Ddistance = cumsum(Dvelocity); NEDposition = [Ndistance,Edistance,Ddistance];
通过调用模型的GPS测量数据全球定位系统(GPS)对象和你的速度和位置矩阵。
[~,~,groundspeedMeasurement courseMeasurement] = GPS (NEDposition NEDvelocity);
策划水平和区别真正的课程和课程返回的GPS模拟器。
随着水平增加,增加过程的准确性。注意,速度增加在最后10秒没有影响,因为额外的速度不是在地上飞机。
t = (0: numSamples-1) / GPS.SampleRate;次要情节(2,1,1)情节(t,水平速度);ylabel (“速度(米/秒)”)标题(“课程水平速度和精度之间的关系”次要情节(2,1,2)courseAccuracy = courseMeasurement -课程;情节(t, courseAccuracy)包含(“时间(s)”);ylabel (“当然精度(度)”)
模型的GPS接收器的数据
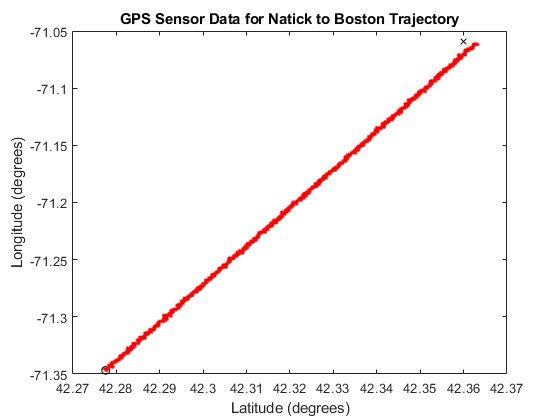
模拟过程中接收到的GPS数据轨迹从纳蒂克,妈,波士顿,MA。
定义了十进制度经度和纬度的纳马美国、美国波士顿,MA。为简单起见,高度的位置设置为零。
NatickLLA = (42.27752809999999, -71.34680909999997, 0);BostonLLA = (42.3600825, -71.05888010000001, 0);
定义一个运动,可以在20分钟内从纳蒂克到波士顿的一个平台。设置本地NED坐标系统的起源是纳蒂克。创建一个waypointTrajectory对象输出轨迹10个样本。
fs = 1;时间= 60 * 20;轴承= 68;%度距离= 25.39 e3;%米distanceEast =距离*信德(轴承);distanceNorth =距离* cosd(轴承);NatickNED = (0, 0, 0);波士顿= (distanceNorth distanceEast 0);轨迹= waypointTrajectory (…“锚点”(NatickNED;波士顿),…“TimeOfArrival”(0;持续时间),…“SamplesPerFrame”10…“SampleRate”fs);
创建一个gpsSensor对象模型接收GPS数据的平台。设置HorizontalPositionalAccuracy来25和DecayFactor来0.25强调了噪音。设置ReferenceLocation在LLA纳蒂克坐标。
全球定位系统(GPS) = gpsSensor (…“HorizontalPositionAccuracy”25岁的…“DecayFactor”,0.25,…“SampleRate”fs,…“ReferenceLocation”,NatickLLA);
打开一个图,图的位置在LLA纳蒂克和波士顿。忽略海拔为简单起见。
在一个循环中,调用gpsSensor对象的真实轨迹模拟接收到的GPS数据。情节真实轨迹和接收GPS数据的模型。
图(1)情节(NatickLLA (1) NatickLLA (2),“柯”,…BostonLLA BostonLLA (1) (2),“kx”)包含(的纬度(度))ylabel (的经度(度))标题(“纳蒂克到波士顿GPS传感器数据轨迹”)举行在而~ ~结束(轨迹)[truePositionNED, trueVelocityNED] =轨迹();reportedPositionLLA = GPS (truePositionNED trueVelocityNED);图(1)情节(reportedPositionLLA (: 1), reportedPositionLLA (:, 2),“r”。)结束
作为一项最佳实践,完成时释放系统对象。
发布(GPS)发布(轨迹)