insfilterAsyncgydF4y2Ba
描述gydF4y2Ba
的gydF4y2BainsfilterAsyncgydF4y2Ba对象实现传感器融合的高山草地和GPS数据来估计NED(或ENU表示)参考系。玛格(磁、角速率、重力)数据通常来源于磁强计,陀螺仪和加速度计数据,分别。过滤器使用28-element状态向量跟踪定位gydF4y2Ba四元数gydF4y2Ba,速度,位置,玛格传感器偏差和地磁矢量。的gydF4y2BainsfilterAsyncgydF4y2Ba对象使用一个continuous-discrete扩展卡尔曼滤波器来估计这些量。gydF4y2Ba
创建gydF4y2Ba
语法gydF4y2Ba
描述gydF4y2Ba
过滤器gydF4y2Ba= insfilterAsyncgydF4y2BainsfilterAsyncgydF4y2Ba对象异步融合高山草地和GPS数据和默认属性值。gydF4y2Ba
过滤器gydF4y2Ba= insfilterAsync (gydF4y2Ba“ReferenceFrame”gydF4y2Ba,gydF4y2Ba射频gydF4y2Ba)gydF4y2Ba射频gydF4y2Ba的,gydF4y2Ba过滤器gydF4y2Ba。指定gydF4y2Ba射频gydF4y2Ba作为gydF4y2BaNED的gydF4y2Ba(North-East-Down)或gydF4y2Ba“ENU表示”gydF4y2Ba(East-North-Up)。默认值是gydF4y2BaNED的gydF4y2Ba。gydF4y2Ba
过滤器gydF4y2Ba= insfilterAsync (gydF4y2Ba___gydF4y2Ba,gydF4y2Ba名称,值gydF4y2Ba)gydF4y2Ba过滤器gydF4y2Ba使用一个或多个名称-值对。在单引号附上每个属性的名字。gydF4y2Ba
属性gydF4y2Ba
对象的功能gydF4y2Ba
预测gydF4y2Ba |
基于运动模型的更新状态gydF4y2BainsfilterAsyncgydF4y2Ba |
fuseaccelgydF4y2Ba |
正确使用加速度计数据gydF4y2BainsfilterAsyncgydF4y2Ba |
fusegyrogydF4y2Ba |
使用陀螺仪数据正确的状态gydF4y2BainsfilterAsyncgydF4y2Ba |
fusemaggydF4y2Ba |
使用磁力仪数据正确的状态gydF4y2BainsfilterAsyncgydF4y2Ba |
fusegpsgydF4y2Ba |
正确使用GPS数据gydF4y2BainsfilterAsyncgydF4y2Ba |
正确的gydF4y2Ba |
正确的国家使用直接测量状态gydF4y2BainsfilterAsyncgydF4y2Ba |
剩余gydF4y2Ba |
残差和残余协方差从直接测量状态gydF4y2BainsfilterAsyncgydF4y2Ba |
residualaccelgydF4y2Ba |
残差和协方差剩余加速度计测量gydF4y2BainsfilterAsyncgydF4y2Ba |
residualgpsgydF4y2Ba |
从GPS测量残差和残余协方差gydF4y2BainsfilterAsyncgydF4y2Ba |
residualmaggydF4y2Ba |
残差和协方差剩余磁强计测量gydF4y2BainsfilterAsyncgydF4y2Ba |
residualgyrogydF4y2Ba |
从陀螺仪测量残差和残余协方差gydF4y2BainsfilterAsyncgydF4y2Ba |
构成gydF4y2Ba |
当前位置、方向和速度估计gydF4y2BainsfilterAsyncgydF4y2Ba |
重置gydF4y2Ba |
重置的内部状态gydF4y2BainsfilterAsyncgydF4y2Ba |
stateinfogydF4y2Ba |
显示状态向量信息gydF4y2BainsfilterAsyncgydF4y2Ba |
复制gydF4y2Ba |
创建的副本gydF4y2BainsfilterAsyncgydF4y2Ba |
调优gydF4y2Ba |
调优gydF4y2BainsfilterAsyncgydF4y2Ba参数估计误差减少gydF4y2Ba |
tunernoisegydF4y2Ba |
噪声融合滤波器的结构gydF4y2Ba |
例子gydF4y2Ba
估计无人机的姿态gydF4y2Ba
负荷记录传感器数据和地面真理构成。gydF4y2Ba
负载(gydF4y2Ba“uavshort.mat”gydF4y2Ba,gydF4y2Ba“refloc”gydF4y2Ba,gydF4y2Ba“initstate”gydF4y2Ba,gydF4y2Ba“imuFs”gydF4y2Ba,gydF4y2Ba…gydF4y2Ba“加速”gydF4y2Ba,gydF4y2Ba“陀螺”gydF4y2Ba,gydF4y2Ba“杂志”gydF4y2Ba,gydF4y2Ba“lla”gydF4y2Ba,gydF4y2Ba“gpsvel”gydF4y2Ba,gydF4y2Ba…gydF4y2Ba“trueOrient”gydF4y2Ba,gydF4y2Ba“truePos”gydF4y2Ba)gydF4y2Ba
创建一个INS过滤器保险丝异步高山草地和GPS数据来估计姿势。gydF4y2Ba
filt = insfilterAsync;filt。ReferenceLocation = refloc;filt。状态= [initstate (1:4); 0, 0, 0; initstate (5:10); 0, 0, 0; initstate(11:结束)];gydF4y2Ba
定义传感器测量噪声。和实验数据的噪声测定。gydF4y2Ba
Rmag = 80;Rvel = 0.0464;Racc = 800;Rgyro = 1的军医;rpo = 34;gydF4y2Ba
Preallocate变量的位置和姿态。分配一个变量索引到GPS数据。gydF4y2Ba
N =大小(accel, 1);p = 0 (N, 3);q = 0 (N, 1gydF4y2Ba“四元数”gydF4y2Ba);gpsIdx = 1;gydF4y2Ba
融合加速度计、陀螺仪、磁力仪和GPS数据。外循环过滤一次向前一步,融合预测IMU的加速度计和陀螺仪数据采样率。gydF4y2Ba
为gydF4y2Ba2 = 1:NgydF4y2Ba%预测过滤一次向前一步gydF4y2Ba预测(filt, 1. / imuFs);gydF4y2Ba%加速度计和陀螺仪数据融合gydF4y2Bafuseaccel (filt accel (ii):), Racc);fusegyro (filt陀螺(ii):), Rgyro);gydF4y2Ba%引信磁强计1/2乌兹别克斯坦伊斯兰运动速度gydF4y2Ba如果gydF4y2Ba~国防部(ii,修复(imuFs / 2) fusemag (filt,杂志(ii):), Rmag);gydF4y2Ba结束gydF4y2Ba%融合GPS每秒一次gydF4y2Ba如果gydF4y2Ba~国防部(ii, imuFs) fusegps (filt, lla (gpsIdx:), rpo, gpsvel (gpsIdx:), Rvel);gpsIdx = gpsIdx + 1;gydF4y2Ba结束gydF4y2Ba%记录当前姿态估计gydF4y2Ba[p (ii):), (ii)] =姿势(filt);gydF4y2Ba结束gydF4y2Ba
计算已知的正确位置和姿态之间的均方根误差和异步IMU滤波器的输出。gydF4y2Ba
posErr = truePos - p;qErr = rad2deg (dist (trueOrient q));人口、难民和移民事务局(12(平均(posErr ^ 2));则=√意味着(qErr ^ 2));流(gydF4y2Ba“位置均方根误差\ n”gydF4y2Ba);gydF4y2Ba
位置的均方根误差gydF4y2Ba
流(gydF4y2Ba“\ tX: %。2f,Y: %.2f, Z: %.2f (meters)\n\n'人口、难民和移民事务局(1)人口、难民和移民事务局(2),人口、难民和移民事务局(3));gydF4y2Ba
Y X: 0.55: 0.71, Z: 0.74(米)gydF4y2Ba
流(gydF4y2Ba“均方根误差四元数距离\ n”gydF4y2Ba);gydF4y2Ba
均方根误差四元数距离gydF4y2Ba
流(gydF4y2Ba' \ t %。2f(degree年代)\n\n',则);gydF4y2Ba
4.72(度)gydF4y2Ba
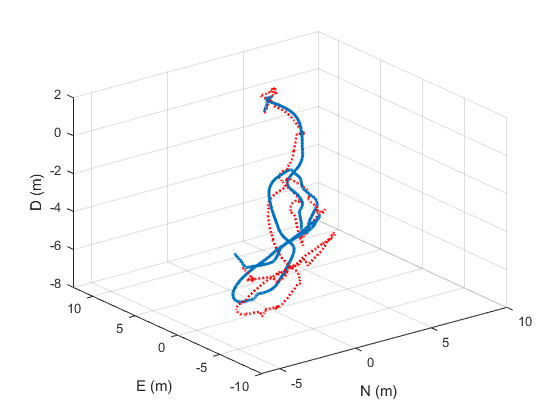
想象的真实位置和估计的位置。gydF4y2Ba
plot3 (truePos (: 1) truePos (:, 2), truePos (:, 3),gydF4y2Ba“线宽”gydF4y2Ba,2)gydF4y2Ba在gydF4y2Baplot3 (p (: 1), p (:, 2), p (:, 3),gydF4y2Ba“:”gydF4y2Ba,gydF4y2Ba“线宽”gydF4y2Ba,2)网格gydF4y2Ba在gydF4y2Ba包含(gydF4y2Ba“N (m)”gydF4y2Ba)ylabel (gydF4y2Ba“E (m)”gydF4y2Ba)zlabel (gydF4y2Ba“D (m)”gydF4y2Ba)gydF4y2Ba
算法gydF4y2Ba
扩展功能gydF4y2Ba
版本历史gydF4y2Ba
介绍了R2019agydF4y2Ba
另请参阅gydF4y2Ba
insfilterErrorStategydF4y2Ba|gydF4y2BainsfilterNonholonomicgydF4y2Ba|gydF4y2BainsfilterMARGgydF4y2Ba
你也可以从下面的列表中选择一个网站:gydF4y2Ba
美洲gydF4y2Ba
- 美国拉丁gydF4y2Ba(西班牙语)gydF4y2Ba
- 加拿大gydF4y2Ba(英语)gydF4y2Ba
- 美国gydF4y2Ba(英语)gydF4y2Ba
欧洲gydF4y2Ba
- 比利时gydF4y2Ba(英语)gydF4y2Ba
- 丹麦gydF4y2Ba(英语)gydF4y2Ba
- 德国gydF4y2Ba(德语)gydF4y2Ba
- 西班牙gydF4y2Ba(西班牙语)gydF4y2Ba
- 芬兰gydF4y2Ba(英语)gydF4y2Ba
- 法国gydF4y2Ba(法语)gydF4y2Ba
- 爱尔兰gydF4y2Ba(英语)gydF4y2Ba
- 意大利gydF4y2Ba(意大利语)gydF4y2Ba
- 卢森堡gydF4y2Ba(英语)gydF4y2Ba
- 荷兰gydF4y2Ba(英语)gydF4y2Ba
- 挪威gydF4y2Ba(英语)gydF4y2Ba
- 奥地利gydF4y2Ba(德语)gydF4y2Ba
- 葡萄牙gydF4y2Ba(英语)gydF4y2Ba
- 瑞典gydF4y2Ba(英语)gydF4y2Ba
- 瑞士gydF4y2Ba
- 联合王国gydF4y2Ba(英语)gydF4y2Ba
亚太地区gydF4y2Ba
- 澳大利亚gydF4y2Ba(英语)gydF4y2Ba
- 印度gydF4y2Ba(英语)gydF4y2Ba
- 新西兰gydF4y2Ba(英语)gydF4y2Ba
- 中国gydF4y2Ba
- 日本gydF4y2Ba(日本語)gydF4y2Ba
- 한국gydF4y2Ba(한국어)gydF4y2Ba