insfilterErrorStategydF4y2Ba
描述gydF4y2Ba
的gydF4y2BainsfilterErrorStategydF4y2Ba对象实现IMU的传感器融合、GPS和单眼视觉里程计(微血管)数据来估计姿势NED(或ENU表示)参考系。过滤器使用17-element状态向量跟踪定位gydF4y2Ba四元数gydF4y2Ba,速度,位置,IMU传感器偏差,MVO比例因子。的gydF4y2BainsfilterErrorStategydF4y2Ba对象使用一个误差状态卡尔曼滤波器来估计这些量。gydF4y2Ba
创建gydF4y2Ba
语法gydF4y2Ba
描述gydF4y2Ba
过滤器gydF4y2Ba= insfilterErrorStategydF4y2BainsfilterErrorStategydF4y2Ba对象的默认属性值。gydF4y2Ba
过滤器gydF4y2Ba= insfilterErrorState (gydF4y2Ba“ReferenceFrame”gydF4y2Ba,gydF4y2Ba射频gydF4y2Ba)gydF4y2Ba射频gydF4y2Ba的,gydF4y2Ba过滤器gydF4y2Ba。指定gydF4y2Ba射频gydF4y2Ba作为gydF4y2BaNED的gydF4y2Ba(North-East-Down)或gydF4y2Ba“ENU表示”gydF4y2Ba(East-North-Up)。默认值是gydF4y2BaNED的gydF4y2Ba。gydF4y2Ba
过滤器gydF4y2Ba= insfilterErrorState (gydF4y2Ba___gydF4y2Ba,gydF4y2Ba名称,值gydF4y2Ba)gydF4y2Ba过滤器gydF4y2Ba使用一个或多个名称-值对。在单引号附上每个属性的名字。gydF4y2Ba
属性gydF4y2Ba
对象的功能gydF4y2Ba
预测gydF4y2Ba |
使用的加速度计和陀螺仪数据更新状态gydF4y2BainsfilterErrorStategydF4y2Ba |
正确的gydF4y2Ba |
正确的国家使用直接测量状态gydF4y2BainsfilterErrorStategydF4y2Ba |
剩余gydF4y2Ba |
残差和残余协方差从直接测量状态gydF4y2BainsfilterErrorStategydF4y2Ba |
fusegpsgydF4y2Ba |
正确使用GPS数据gydF4y2BainsfilterErrorStategydF4y2Ba |
residualgpsgydF4y2Ba |
从GPS测量残差和残余协方差gydF4y2BainsfilterErrorStategydF4y2Ba |
fusemvogydF4y2Ba |
正确的使用单眼视觉测程法gydF4y2BainsfilterErrorStategydF4y2Ba |
residualmvogydF4y2Ba |
残差和协方差残余单眼视觉里程计测量gydF4y2BainsfilterErrorStategydF4y2Ba |
构成gydF4y2Ba |
电流方向和位置估计gydF4y2BainsfilterErrorStategydF4y2Ba |
重置gydF4y2Ba |
重置的内部状态gydF4y2BainsfilterErrorStategydF4y2Ba |
stateinfogydF4y2Ba |
显示状态向量信息gydF4y2BainsfilterErrorStategydF4y2Ba |
调优gydF4y2Ba |
调优gydF4y2BainsfilterErrorStategydF4y2Ba参数估计误差减少gydF4y2Ba |
复制gydF4y2Ba |
创建的副本gydF4y2BainsfilterErrorStategydF4y2Ba |
例子gydF4y2Ba
估计造成的地面车辆gydF4y2Ba
记录数据加载后的地面车辆一个圆形轨迹。的gydF4y2Ba.matgydF4y2Ba文件包含IMU和GPS传感器测量和地面真理的方向和位置。gydF4y2Ba
负载(gydF4y2Ba“loggedGroundVehicleCircle.mat”gydF4y2Ba,gydF4y2Ba…gydF4y2Ba“imuFs”gydF4y2Ba,gydF4y2Ba“localOrigin”gydF4y2Ba,gydF4y2Ba…gydF4y2Ba“initialStateCovariance”gydF4y2Ba,gydF4y2Ba…gydF4y2Ba“accelData”gydF4y2Ba,gydF4y2Ba“gyroData”gydF4y2Ba,gydF4y2Ba…gydF4y2Ba“gpsFs”gydF4y2Ba,gydF4y2Ba“gpsLLA”gydF4y2Ba,gydF4y2Ba“rpo”gydF4y2Ba,gydF4y2Ba“gpsVel”gydF4y2Ba,gydF4y2Ba“Rvel”gydF4y2Ba,gydF4y2Ba…gydF4y2Ba“trueOrient”gydF4y2Ba,gydF4y2Ba“truePos”gydF4y2Ba);gydF4y2Ba
创建一个INS过滤器保险丝IMU和GPS数据使用一个误差状态卡尔曼滤波器。gydF4y2Ba
initialState =[紧凑(trueOrient (1)), truePos (1:), -6.8 e - 3, 2.5002, 0, 0 (1,6), 1]。”;filt = insfilterErrorState;filt。IMUSampleRate = imuFs;filt。ReferenceLocation = localOrigin;filt。状态= initialState;filt。StateCovariance = initialStateCovariance;gydF4y2Ba
Preallocate变量的位置和姿态。分配一个变量索引到GPS数据。gydF4y2Ba
numIMUSamples =大小(accelData, 1);estOrient = 1 (numIMUSamples 1gydF4y2Ba“四元数”gydF4y2Ba);estPos = 0 (numIMUSamples, 3);gpsIdx = 1;gydF4y2Ba
融合加速度计、陀螺仪和GPS数据。外循环预测滤波器在最快的采样率(IMU采样率)。gydF4y2Ba
为gydF4y2Baidx = 1: numIMUSamplesgydF4y2Ba%使用预测估计滤波器基于accelData和状态gydF4y2Ba% gyroData数组。gydF4y2Ba预测(filt accelData (idx:), gyroData (idx:));gydF4y2Ba% GPS数据被收集在一个较低的采样率比IMU数据。融合GPSgydF4y2Ba%数据速度较低。gydF4y2Ba如果gydF4y2Ba国防部(idx imuFs / gpsFs) = = 0gydF4y2Ba%根据GPS数据正确的过滤状态。gydF4y2Bafusegps (filt gpsLLA (gpsIdx:), rpo, gpsVel (gpsIdx:), Rvel);gpsIdx = gpsIdx + 1;gydF4y2Ba结束gydF4y2Ba%记录当前姿态估计gydF4y2Ba:[estPos idx), estOrient (idx:)] =姿势(filt);gydF4y2Ba结束gydF4y2Ba
计算已知的正确位置和姿态之间的均方根误差和误差状态滤波器的输出。gydF4y2Ba
穗青葱= truePos - estPos;qErr = rad2deg (dist (estOrient trueOrient));人口、难民和移民事务局(12(平均(穗青葱。^ 2));则=√意味着(qErr ^ 2));流(gydF4y2Ba“位置均方根误差\ n”gydF4y2Ba);gydF4y2Ba
位置的均方根误差gydF4y2Ba
流(gydF4y2Ba“\ tX: %。2f,Y: %.2f, Z: %.2f (meters)\n\n'人口、难民和移民事务局(1)人口、难民和移民事务局(2),人口、难民和移民事务局(3));gydF4y2Ba
Y X: 0.40: 0.24, Z: 0.05(米)gydF4y2Ba
流(gydF4y2Ba“均方根误差四元数距离\ n”gydF4y2Ba);gydF4y2Ba
均方根误差四元数距离gydF4y2Ba
流(gydF4y2Ba' \ t %。2f(degrees)\n\n',则);gydF4y2Ba
0.30(度)gydF4y2Ba
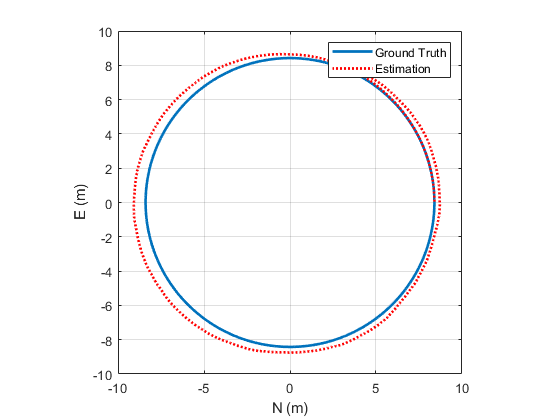
想象的真实位置和估计的位置。gydF4y2Ba
情节(truePos (: 1) truePos (:, 2), estPos (: 1), estPos (:, 2),gydF4y2Ba“:”gydF4y2Ba,gydF4y2Ba“线宽”gydF4y2Ba,2)网格gydF4y2Ba在gydF4y2Ba轴gydF4y2Ba广场gydF4y2Ba包含(gydF4y2Ba“N (m)”gydF4y2Ba)ylabel (gydF4y2Ba“E (m)”gydF4y2Ba)传说(gydF4y2Ba“地面实况”gydF4y2Ba,gydF4y2Ba“估计”gydF4y2Ba)gydF4y2Ba
算法gydF4y2Ba
注意:下面的算法只适用于一个NED参考系。gydF4y2Ba
insfilterErrorStategydF4y2Ba使用17-axis错误状态卡尔曼滤波器结构来估计姿势NED参考系。国家的定义是:gydF4y2Ba
在哪里gydF4y2Ba
问gydF4y2Ba0gydF4y2Ba,gydF4y2Ba问gydF4y2Ba1gydF4y2Ba,gydF4y2Ba问gydF4y2Ba2gydF4y2Ba,gydF4y2Ba问gydF4y2Ba3gydF4y2Ba——部分取向四元数。姿态四元数表示一个旋转平台的当前帧定位到本地NED坐标系统。gydF4y2Ba
位置gydF4y2BaNgydF4y2Ba,gydF4y2Ba位置gydF4y2BaEgydF4y2Ba,gydF4y2Ba位置gydF4y2BaDgydF4y2Ba——在当地NED平台的位置坐标系统。gydF4y2Ba
gyrobiasgydF4y2BaXgydF4y2Ba,gydF4y2BagyrobiasgydF4y2BaYgydF4y2Ba,gydF4y2BagyrobiasgydF4y2BaZgydF4y2Ba在陀螺仪阅读——偏见。gydF4y2Ba
accelbiasgydF4y2BaXgydF4y2Ba,gydF4y2BaaccelbiasgydF4y2BaYgydF4y2Ba,gydF4y2BaaccelbiasgydF4y2BaZgydF4y2Ba——在加速度计读数偏差。gydF4y2Ba
scaleFactorgydF4y2Ba——比例因子的估计。gydF4y2Ba
考虑到状态转换函数的传统配方,gydF4y2Ba
预测状态估计是:gydF4y2Ba
在哪里gydF4y2Ba
ΔgydF4y2BatgydF4y2Ba——IMU样品时间。gydF4y2Ba
ggydF4y2BaNgydF4y2Ba,gydF4y2BaggydF4y2BaEgydF4y2Ba,gydF4y2BaggydF4y2BaDgydF4y2Ba——不断的重力向量NED框架。gydF4y2Ba
扩展功能gydF4y2Ba
版本历史gydF4y2Ba
介绍了R2019agydF4y2Ba
另请参阅gydF4y2Ba
insfilterAsyncgydF4y2Ba|gydF4y2BainsfilterNonholonomicgydF4y2Ba|gydF4y2BainsfilterMARGgydF4y2Ba
你也可以从下面的列表中选择一个网站:gydF4y2Ba
美洲gydF4y2Ba
- 美国拉丁gydF4y2Ba(西班牙语)gydF4y2Ba
- 加拿大gydF4y2Ba(英语)gydF4y2Ba
- 美国gydF4y2Ba(英语)gydF4y2Ba
欧洲gydF4y2Ba
- 比利时gydF4y2Ba(英语)gydF4y2Ba
- 丹麦gydF4y2Ba(英语)gydF4y2Ba
- 德国gydF4y2Ba(德语)gydF4y2Ba
- 西班牙gydF4y2Ba(西班牙语)gydF4y2Ba
- 芬兰gydF4y2Ba(英语)gydF4y2Ba
- 法国gydF4y2Ba(法语)gydF4y2Ba
- 爱尔兰gydF4y2Ba(英语)gydF4y2Ba
- 意大利gydF4y2Ba(意大利语)gydF4y2Ba
- 卢森堡gydF4y2Ba(英语)gydF4y2Ba
- 荷兰gydF4y2Ba(英语)gydF4y2Ba
- 挪威gydF4y2Ba(英语)gydF4y2Ba
- 奥地利gydF4y2Ba(德语)gydF4y2Ba
- 葡萄牙gydF4y2Ba(英语)gydF4y2Ba
- 瑞典gydF4y2Ba(英语)gydF4y2Ba
- 瑞士gydF4y2Ba
- 联合王国gydF4y2Ba(英语)gydF4y2Ba
亚太地区gydF4y2Ba
- 澳大利亚gydF4y2Ba(英语)gydF4y2Ba
- 印度gydF4y2Ba(英语)gydF4y2Ba
- 新西兰gydF4y2Ba(英语)gydF4y2Ba
- 中国gydF4y2Ba
- 日本gydF4y2Ba(日本語)gydF4y2Ba
- 한국gydF4y2Ba(한국어)gydF4y2Ba