平台
语法
平台(sc)
ptfm =平台(sc,名称,值)
描述
企业加工=平台(sc)平台对象,企业加工,到跟踪场景,sc。该函数创建一个具有默认属性值的平台。平台被定义为具有方面相关属性的点或长方体。类型中指定的唯一ID自动分配给每个平台platformID字段平台对象。
企业加工=平台(sc,名称,值)名称,值对参数。名字属性名和价值对应的值。名字必须出现在单引号内('').您可以以任意顺序指定多个名称-值对参数Name1, Value1,…,的家。任何未指定的属性都采用默认值。
输入参数
sc- - - - - -跟踪情况
trackingScenario对象
跟踪场景,指定为trackingScenario对象。
名称-值参数
指定可选参数对为Name1 = Value1,…,以=家,在那里名字参数名称和价值对应的值。名称-值参数必须出现在其他参数之后,但对的顺序无关紧要。
在R2021a之前,使用逗号分隔每个名称和值,并将其括起来名字在报价。
ClassID- - - - - -平台分类标识
0(默认)|非负整数
指定为非负整数的平台分类标识符。您可以定义自己的平台分类方案并进行分配ClassID根据方案分配给平台的值。的价值0为未知或未赋值类的对象保留。
例子:5
数据类型:双
位置- - - - - -平台位置
标量的3元向量
此属性是只读的。
平台的当前位置,指定为标量的3元素向量。
当
IsEarthCentered属性设置为假时,位置指定为三元笛卡尔态[x,y,z以米为单位。当
IsEarthCentered属性设置为真正的时,位置指定为三元大地测量状态:纬度在度,经度以度为单位高度在米。
你应该只在创建固定平台时指定位置。如果你选择指定平台的轨迹,不要使用位置。相反,使用轨迹论点。
数据类型:双
取向- - - - - -平台定位
标量的3元向量
此属性是只读的。
平台的方向,指定为以度为单位的3元素标量向量。这三个标量是[偏航,球场,卷]从本地参考框架到平台主体框架的旋转角度。
你应该只指定取向当创建一个固定的平台。如果选择随时间指定方向,请使用轨迹论点。
数据类型:双
维- - - - - -平台尺寸和原点偏移量
结构体
平台尺寸和原点偏移量,作为结构指定。结构包含长度,宽度,高度,OriginOffset一个长方体,接近平台的尺寸。的OriginOffset是从长方体中心到平台坐标系原点的位置向量。的OriginOffset在平台坐标系中表示。如下图所示,平台原点位于长方体后端面的中心,则设置OriginOffset作为(- - - - - -l/ 2,0,0]。的默认值维是一个所有字段都设置为零的结构,它对应于一个点模型。

领域的维
| 字段 | 描述 | 默认的 |
|---|---|---|
长度 |
长方体沿的长度x方向 | 0 |
宽度 |
长方体沿的长度y方向 | 0 |
高度 |
长方体沿的长度z方向 | 0 |
OriginOffset |
平台坐标系原点相对长方体中心的位置 | [0 0 0] |
例子:结构(“长度”5“宽度”,2.5,“高度”,3.5,“OriginOffset”,[-2.5 0 0])
数据类型:结构体
轨迹- - - - - -平台运动
kinematicTrajectory对象|waypointTrajectory对象|geoTrajectory对象
平台运动,指定为akinematicTrajectory对象,waypointTrajectory对象,或geoTrajectory对象。轨迹对象定义了平台帧原点位置和速度的时间演化,以及平台帧相对于场景帧的方向。
当
IsEarthCentered属性设置为假,你可以使用kinematicTrajectory或者是waypointTrajectory对象。默认情况下,为stationarykinematicTrajectory对象。当
IsEarthCentered属性设置为真正的,您只能使用geoTrajectory对象。默认情况下,为stationarygeoTrajectory对象。
签名- - - - - -平台的签名
{rcsSignatureirSignaturetsSignature}(默认)|签名对象的单元格数组
的单元格数组指定的平台签名irSignature,rcsSignature,tsSignature对象或空单元格数组。对于列出的每种签名对象类型,单元格数组最多只包含一个实例。特征表示平台的反射或发射模式,如其雷达横截面、目标强度或IR强度。
PoseEstimator- - - - - -平台姿态估计器
insSensor系统对象(默认)|姿态估计对象
一个姿态估计器,指定为姿态估计器对象。姿态估计器根据局部NED场景坐标确定平台姿态。姿态估计器的接口必须与姿态估计器的接口匹配insSensor。默认情况下,姿态估计器精度属性被设置为零。
发射器- - - - - -发射器安装在平台上
发射器对象的单元格数组
安装在平台上的发射器,指定为发射器对象的单元格数组,例如radarEmitter或sonarEmitter。
传感器- - - - - -安装在平台上的传感器
传感器对象的单元格数组
安装在平台上的传感器,指定为单元阵列的传感器对象,如irSensor,fusionRadarSensor,monostaticLidarSensor,或sonarSensor。
输出参数
例子
平台遵循圆形轨迹
按照循环路径创建一个跟踪场景和平台。
scene = trackingScenario(“UpdateRate”, 1/50);%创建一个平台平台(场景);沿着半径1公里的圆形轨迹,在400秒内完成。平台。轨迹=航路点“锚点”, [0 1000 0;1000 00;0 -1000 0;-1000 00;0 1000 0],...“TimeOfArrival”, (0;100;200;300;400));%执行模拟而现场。前进p =姿势(平板);流('时间= %f ', scene.SimulationTime);流('Position = [');流(' % f ', p.Position);流(']速度= [');流(' % f ', p.Velocity);流(“]\ n”);结束
时间= 0.000000
位置= [
0.000000 1000.000000 0.000000
]速度= [
15.707701 -0.000493 0.000000
]
Time = 50.000000
位置= [
707.095476 707.100019 0.000000
]速度= [
11.107152 -11.107075 0.000000
]
Time = 100.000000
位置= [
1000.000000 0.000000 0.000000
]速度= [
0.000476 -15.707961 0.000000
]
时间= 150.000000
位置= [
707.115558 -707.115461 0.000000
]速度= [
-11.107346 -11.107341 0.000000
]
时间= 200.000000
位置= [
0.000000 -1000.000000 0.000000
]速度= [
-15.707963 0.000460 0.000000
]
时间= 250.000000
位置= [
-707.098004 -707.098102 0.000000
]速度= [
-11.107069 11.107074 0.000000
]
时间= 300.000000
位置= [
-1000.000000 0.000000 0.000000
]速度= [
-0.000476 15.707966 0.000000
]
时间= 350.000000
位置= [
-707.118086 707.113543 0.000000
]速度= [
11.107262 11.107340 0.000000
]
时间= 400.000000
位置= [
-0.000000 1000.000000 0.000000
]速度= [
15.708226 -0.000493 0.000000
]
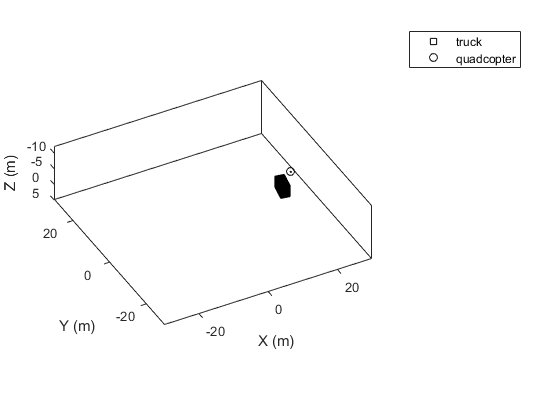
长方体平台遵循圆形轨迹
创建一个跟踪场景,两个长方体平台跟随圆形轨迹。
sc = trackingScenario;为一辆尺寸为5 x 2.5 x 3.5 (m)的卡车创建平台。P1 =平台(sc);p1。尺寸= struct(“长度”5,“宽度”, 2.5,“高度”, 3.5,“OriginOffset”,[0 0 0]);指定卡车的轨迹为半径20米的圆。。p1。轨迹=航路点“锚点”(20 * cos(2 *π* (0:10)/ 10)...20 * sin(2 *π*(0:10)/ 10)-1.75 * 1(11日1)),...“TimeOfArrival”, linspace(0, 50岁,11)');为尺寸为.3 x .3 x .1 (m)的小型四轴飞行器创建平台。P2 =平台(sc);p2。尺寸= struct(“长度”3,“宽度”3,“高度”、1。“OriginOffset”,[0 0 0]);四轴飞行器在10米以上跟随卡车飞行,角延迟很小。注意,负z坐标对应正仰角。p2。轨迹=航路点“锚点”(20 * cos(2 *π*((0:10)。6)/ 10)...20 * sin(2 *π*((0:10)。6)/ 10)-11.80 * 1(11日1)),...“TimeOfArrival”, linspace(0, 50岁,11)');
使用以下方法将结果可视化theaterPlot。
tp = theaterPlot(“XLim”, 30 [-30],“YLim”, 30 [-30],“Zlim”, -12年[5]);pp1 = platformPlotter(tp,“DisplayName的”,“卡车”,“标记”,“年代”);pp2 = platformPlotter(tp,“DisplayName的”,四轴飞行器的,“标记”,“o”);指定一个视图方向和动画。视图(-28年,37);集(gca),“Zdir”,“反向”);而advance(sc) pose = platformpose (sc);plotPlatform (pp1姿势(1)。位置,p1。维,poses(1).Orientation); plotPlatform(pp2, poses(2).Position, p2.Dimensions, poses(2).Orientation);结束
版本历史
在R2018b中引入
您也可以从以下列表中选择一个网站: