sonarSensor
从声纳生成检测排放
描述
的sonarSensor系统对象™创建一个从声纳生成检测排放的统计模型。你可以从主动或被动声纳系统生成检测。您可以使用sonarSensor对象在一个场景中模型的移动和固定平台使用trackingScenario。声纳传感器可以模拟真实的检测与添加随机噪声并生成错误的报警检测。此外,您可以使用这个对象创建追踪器等的输入trackerGNN或trackerTOMHT。
该对象允许您配置电子扫描声纳。扫描声纳的夹角变化更新电子位置的步进梁角增量的跨中指定FieldOfView财产。声纳扫描整个区域定义的方位和仰角声纳电子扫描限制,ElectronicScanLimits。如果扫描方位和仰角设置的限制[0 0]沿着维度的不执行扫描,扫描模式。如果最大的电子扫描速率方位或海拔高度设置为零,不执行电子扫描沿着维度。
生成声纳检测:
创建
sonarSensor对象并设置其属性。调用对象的参数,就好像它是一个函数。
了解更多关于系统对象是如何工作的,看到的系统对象是什么?
创建
语法
描述
传感器= sonarSensor (SensorIndex)
传感器= sonarSensor (SensorIndex“没有扫描”)sonarSensor沿着声纳换能器,目光瞄准线的方向。不执行电子扫描。这个语法设置ScanMode财产“没有扫描”。
传感器= sonarSensor (SensorIndex、“光栅”)sonarSensor对象,电子扫描光栅模式。光栅跨度为90°的方位-45°+ 45°,海拔从地平线到10°在地平线上。看到方便的语法这个语法设定的属性。
传感器= sonarSensor (SensorIndex“旋转”)sonarSensor对象,电子扫描电子旋转360°方位的传感器以恒定速率。当您设置HasElevation来真正的,声纳传感器电子指向中心的海拔的视野。看到方便的语法这个语法设定的属性。
传感器= sonarSensor (SensorIndex“部门”)sonarSensor对象,电子扫描90°方位部门从-45°+ 45°。设置HasElevation来真正的指出,声纳换能器向海拔视场的中心。束电子堆积过程整个海拔张成的扫描限制在一个单一的住。看到方便的语法这个语法设定的属性。
传感器= sonarSensor (___,名称,值)sonarSensor (‘DetectionCoordinates’,‘传感器笛卡儿’,‘MaxRange’, 200)创建一个声纳检测发电机传感器检测报告的笛卡儿坐标系统,最大探测距离为200米。如果您指定传感器使用的索引SensorIndex财产,你可以省略SensorIndex输入。
属性
使用
语法
描述
输入参数
输出参数
对象的功能
使用一个目标函数,指定系统对象作为第一个输入参数。例如,释放系统资源的系统对象命名obj使用这个语法:
发行版(obj)
例子
更多关于
对象检测
传感器测量目标的坐标。的测量和MeasurementNoise值在指定的坐标系统DetectionCoordinates传感器的属性。
当DetectionCoordinates属性是“场景””,身体的,或传感器矩形的,测量和MeasurementNoise值是在直角坐标系中报道。速度只是报道范围率属性时,HasRangeRate,是真正的。
当DetectionCoordinates属性是“球形传感器”,测量和MeasurementNoise值是在球面坐标系来自传感器直角坐标系。海拔高度和范围率只有当报道HasElevation和HasRangeRate是真正的。
测量命令为(方位角、仰角、范围,范围)。报告的海拔高度和范围取决于相应的速率HasElevation和HasRangeRate属性值。角的度,是米不等,范围率是米每秒。
测量坐标
| DetectionCoordinates | 坐标测量和测量噪声 | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
“场景” |
协调的依赖
|
|||||||||||||||
“身体” |
||||||||||||||||
传感器矩形的 |
||||||||||||||||
“球形传感器” |
协调的依赖
|
的MeasurementParameters属性包含一个数组的结构描述序列坐标转换从一个孩子父母帧或逆转换(见框架旋转)。在大多数情况下,最长需要转换传感器平台→→场景的序列。
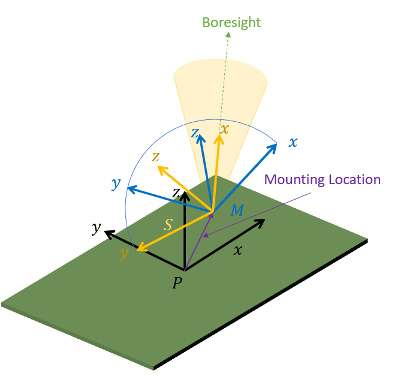
如果传感器球坐标和检测报告之内被设置为假,然后一个转换的序列只包含传感器平台。在转换中,OriginPosition是一样的MountingLocation传感器的属性。的取向由两个连续旋转。第一个旋转,对应MountingAngles属性的传感器,旋转平台框架(占P)传感器安装框架(米)。第二旋转对应的方位角和高度角传感器、旋转传感器安装框架(占米传感器扫描帧()年代)。在年代框架,x方向是瞄准线方向,y方向在x- - - - - -y飞机的传感器安装框架(米)。
如果之内是真正的转换由两个转换的顺序,首先形成场景框架平台框架然后从平台传感器扫描帧。在第一个转换,取向从场景坐标系旋转平台框架,和OriginPosition是平台坐标系原点的位置相对于场景框架。
非常,如果在平台直角坐标和检测报告之内被设置为假的转换仅由身份。
等领域的MeasurementParameters这里所示。不是所有的领域都有出现的结构。字段及其默认值的设置可以依赖于传感器的类型。
| 场 | 描述 |
框架 |
枚举类型指示帧用来测量报告。当检测报告使用直角坐标系统, |
OriginPosition |
位置偏移起源的孩子相对于父帧,表示为一个3×1的向量。 |
OriginVelocity |
速度抵消起源的孩子相对于父帧,表示为一个3×1的向量。 |
取向 |
3 x3的实值正交坐标系的旋转矩阵。旋转的方向取决于 |
IsParentToChild |
一个逻辑标量表示如果 |
HasElevation |
一个逻辑标量指示是否包括在测量高程。测量报告的一个矩形框架,如果 |
HasAzimuth |
一个逻辑标量指示是否包括在测量方位。 |
HasRange |
一个逻辑标量指示是否包括在测量范围。 |
HasVelocity |
一个逻辑标量表示,如果检测报告包括速度测量。测量报告的矩形框架,如果 |
对象属性包含额外的信息检测。
| 属性 | 描述 |
TargetIndex |
标识符的平台, |
EmitterIndex |
指数的发射器发出的检测信号。 |
信噪比 |
在dB检测信噪比。 |
CenterFrequency |
|
带宽 |
|
WaveformType |
|