秃顶
减少模型订单
描述
[___] = balred(___,使用选项集计算还原模型opts)opts您指定使用Balredoptions(控制系统工具箱)。您可以使用绝对和相对误差控制,强调某些时间或频段,并分离稳定且不稳定的模式来指定消除状态的其他选项。看Balredoptions(控制系统工具箱)创建和配置选项集opts。
例子
使用Hankel单数值降低订购模型
对于此示例,请使用Hankel单数值图选择合适的顺序并计算还原阶模型。
对于这种情况,生成具有40个状态的随机离散时间空间模型。
rng(0) sys = drss(40);
Plot the Hankel singular values using秃顶。
秃头(系统)
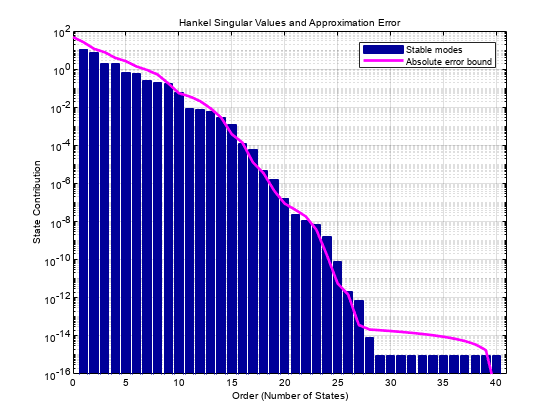
For this example, select order of16由于它是绝对错误的第一阶1E-4。In general, you select the order based on the desired absolute or relative fidelity. Then, compute the reduced-order model.
RSYS = BALRED(SYS,16);
Verify the absolute error by plotting the singular value response usingsigma。
Sigma(SYS,SYS-RSYS)

Observe from the plot that the error, represented by the red curve, is below-80 dB(1E-4)。
降级模型阵列
For this example, consider a random continuous-time state-space model with 65 states.
rng(0) sys = rss(65); size(sys)
具有1个输出,1个输入和65个状态的状态空间模型。
Visualize the Hankel singular values on a plot.
秃头(系统)
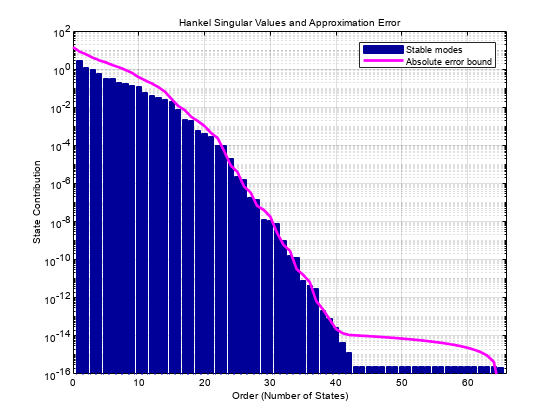
对于这种情况,计算25、30和35个状态的降级模型。
订单= [25,30,35];rsys = balred(sys,order);尺寸(RSYS)
3x1状态空间模型阵列。每个模型都有1个输出,1个输入,在25至35个状态之间。
Reduced-Order Approximation with Offset Option
计算系统的降维近似m given by:
创建模型。
sys = zpk([ - 0.5 -1.1 -2.9],[ - 1e -6 -2 -1 -3],1);
Exclude the pole at
从稳定/不稳定分解的稳定项。为此,设置Offsetoption ofBalredoptions比您要排除的杆更大的值。
opts = balredoptions('抵消',0.001,'StateProjection','截短');
Visualize the Hankel singular values (HSV) and the approximation error.
BALRED(SYS,选择)
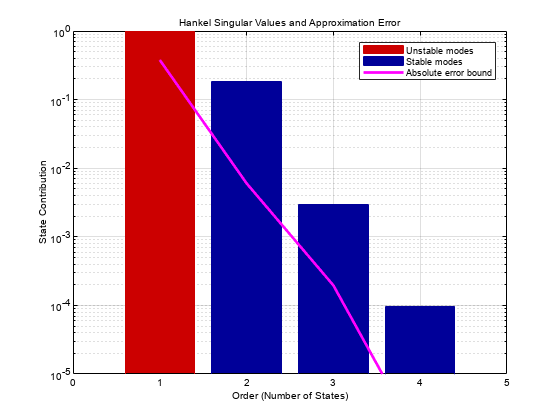
观察第一个HSV为红色,表明它与不稳定模式相关联。
Now, compute a second-order approximation with the specified options.
[rsys,info] = balred(sys,2,opts);RSYS
RSYS= 0.99113 (s+0.5235) ------------------- (s+1e-06) (s+1.952) Continuous-time zero/pole/gain model.
Notice that the pole at-1E-6在还原模型中似乎没有变化RSYS。
比较原始模型和还原级模型的响应。
bodeplot(sys,rsys,'r-')
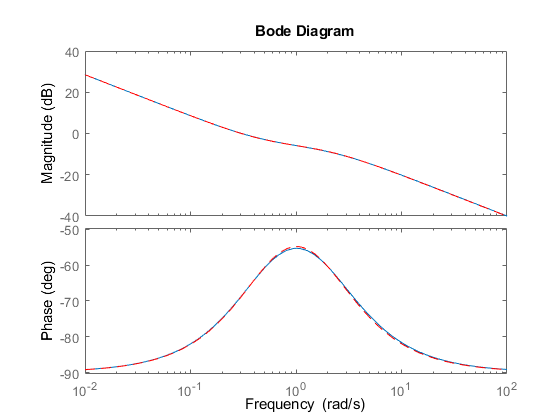
观察原始模型的Bode响应和还原级模型几乎匹配。
Model Reduction in a Particular Frequency Band
减少高阶模型,重点是在特定频率范围内的动力学。
加载模型并检查其频率响应。
加载('Highordormodel.mat','G')BodePlot(G)
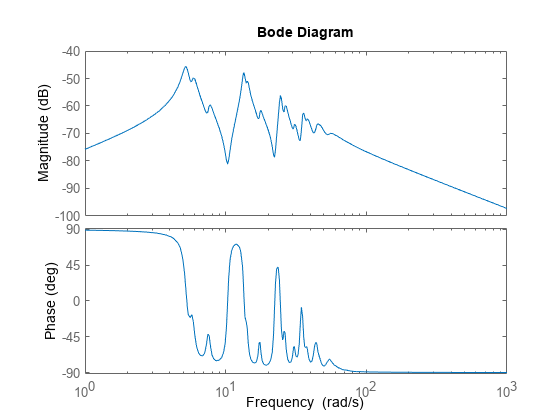
G是一个第48阶模型,在5.2 rad/s,13.5 rad/s和24.5 rad/s之间具有几个大峰区域,并且散布在许多频率上的较小峰。假设对于您的应用,您只对第二个大峰附近的动力学感兴趣,即10 rad/s和22 rad/s。将模型降低集中在感兴趣区域,以获得与低阶近似的良好匹配。利用Balredoptions(控制系统工具箱)指定频率间隔秃顶。
bopt = balredoptions('StateProjection','截短','freqintervals',[10,22]);glim10 = balred(g,10,bopt);glim18 = balred(g,18,bopt);
Examine the frequency responses of the reduced-order models. Also, examine the difference between those responses and the original response (the absolute error).
子图(2,1,1);BodeMag(G,Glim10,Glim18,Logspace(0.5,1.5,100));标题(“ bode幅度图”) 传奇('原来的',订单10','订单18');subplot(2,1,2); bodemag(G-GLim10,G-GLim18,logspace(0.5,1.5,100)); title(“绝对错误图”) 传奇(订单10','订单18');
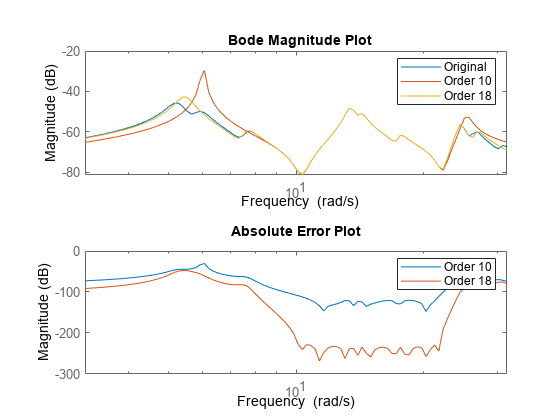
通过频率限制的能量计算,即使是10阶近似值也相当好。
Model-Order Reduction with Relative Error Approximation
对于此示例,请考虑SISO状态空间模型cdromwith 120 states. You can use absolute or relative error control when approximating models with秃顶。此示例比较将两种方法应用于便携式CD播放器设备的120状态模型crdom[1,2]。
加载CD播放器模型cdrom。
loadcdromdata.matcdromsize(cdrom)
具有1个输出,1个输入和120个状态的状态空间模型。
要将结果与绝对和相对错误控制的结果进行比较,请为每种方法创建一个选项集。
opt_abs = balredoptions('错误键','绝对','StateProjection','truncate');opt_rel = balredoptions('错误键','relative','StateProjection','truncate');
使用两种方法计算订单15的降级模型。
rsys_abs= balred(cdrom,15,opt_abs); rsys_rel = balred(cdrom,15,opt_rel); size(rsys_abs)
State-space model with 1 outputs, 1 inputs, and 15 states.
尺寸(rsys_rel)
State-space model with 1 outputs, 1 inputs, and 15 states.
Plot the Bode response of the original model along with the absolute-error and relative-error reduced models.
bo = bodeoptions;bo.posematching ='on';BodePlot(CDROM,'b.',rsys_abs,'r',rsys_rel,'G',bo)传奇('Original (120 states)',“绝对错误(15个状态)”,'Relative Error (15 states)')
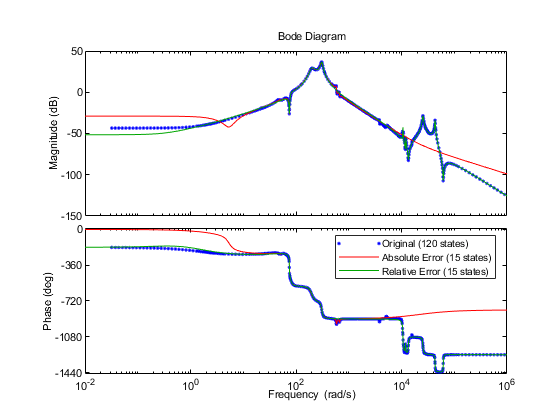
Observe that the Bode response of:
相对纠正的模型
rsys_rel几乎与原始模型的响应匹配系统在整个频率范围内。绝对错误模型
rsys_abs匹配原始模型的响应系统仅在收益最大的地区。
参考
降低模型的基准示例,系统和控制理论(slicot)中的子例程库。CDROM数据集经许可复制,请参阅BSD3-licensefor details.
A.Varga, “On stochastic balancing related model reduction”,Proceedings of the 39th IEEE Conference on Decision and Control (Cat. No.00CH37187),悉尼,新南威尔士州,2000年,第2385-2390卷第3卷,doi:10.1109/cdc.2000.914156。
输入参数
输出参数
算法
参考
[1] Varga,A。,“用于计算奇异扰动近似的无平衡方形 - 根 - 根算法”,”Proc. of 30th IEEE CDC,布莱顿,英国(1991),第1062-1065页。
[2] Green,M。,“平衡随机截断的相对误差”,IEEE Transactions on Automatic Control,卷。33,第10号,1988年
Version History
在R2006a之前引入您还可以从以下列表中选择一个网站:
美洲
- AméricaLatina(Español)
- 加拿大(英语)
- 美国(英语)