高光谱图像处理入门
高光谱成像通过在不同波长成像来测量物体的空间和光谱特征。波长范围超出可见光谱,涵盖从紫外线(UV)到长波红外(LWIR)波长。最常用的是可见光、近红外和中红外波段。高光谱成像传感器在指定的光谱范围内获取多个窄且连续波长的图像。每一张图片都包含了更微妙和详细的信息。
高光谱图像处理涉及表示、分析和解释高光谱图像中包含的信息。

代表高光谱数据
高光谱成像传感器测量的值通过带序(BSQ)、像素带状交错(BIP)或行带状交错(BIL)编码格式存储到二进制数据文件中。数据文件与头文件相关联,头文件包含辅助信息(元数据),如传感器参数、采集设置、空间维度、光谱波长和数据文件中值的正确表示所需的编码格式。
对于高光谱图像处理,从数据文件中读取的值被排列成三维(3-D)的形式M——- - - - - -N——- - - - - -C,在那里M和N是所采集数据的空间维度,C是光谱尺寸,指定在采集过程中使用的光谱波长的数量。因此,您可以将3-D阵列看作是一组在不同波长捕获的2-D单色图像。这个集合被称为高光谱数据立方体或数据立方体.
这个超立方体函数通过读取相关头文件中的数据文件和元数据信息来构造数据立方体。这个超立方体函数创建一个超立方体对象并存储数据立方体、光谱波长及其属性的元数据。你可以使用超立方体对象中的所有其他函数的输入图像处理工具箱™高光谱成像库.
数据立方体的颜色表示
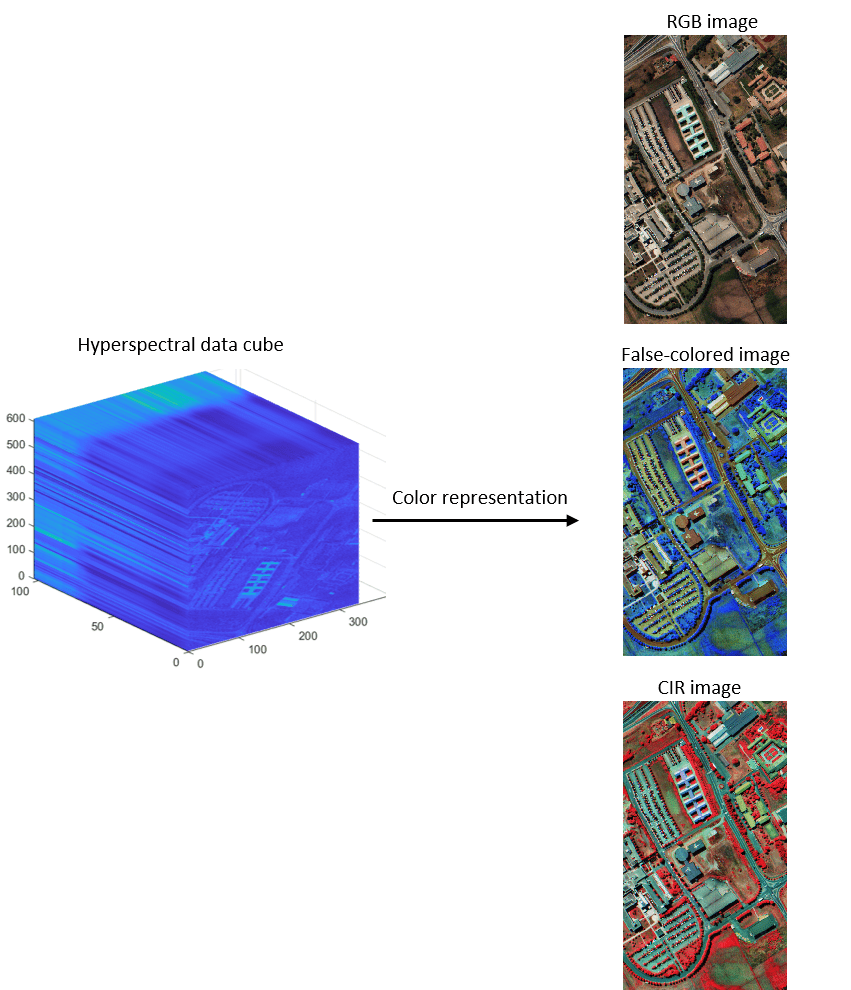
要可视化和理解正在成像的对象,可以使用颜色方案将数据立方体表示为二维图像。数据立方体的颜色表示使您能够直观地检查数据并支持决策。您可以使用金宝app彩色化函数来计算数据立方体的红-绿-蓝(RGB)、伪色和色-红外(CIR)表示。
RGB颜色方案使用红、绿、蓝光谱带响应来生成高光谱数据立方体的二维图像。RGB颜色方案带来了自然的外观,但导致了细微信息的重大损失。
伪色方案使用除了可见的红、绿、蓝光谱波段以外的任意数量波段的组合。使用假颜色表示法来可视化可见光谱以外的波段的光谱响应。伪彩色方案有效地捕获了高光谱数据的所有光谱波段的不同信息。
CIR颜色方案使用近红外范围内的光谱带。高光谱数据立方体的CIR表示在显示和分析数据立方体的植被区域时特别有用。
预处理
高光谱成像传感器通常具有高光谱分辨率和低空间分辨率。获取的高光谱数据的空间和光谱特征以其像素为特征。每个像素都是指定某个位置的强度的值向量(x,Y)在Z不同的乐队。这个向量被称为像素光谱,并定义位于以下位置的像素的光谱特征:(x,Y).像元光谱是高光谱数据分析中的重要特征。但由于传感器噪声、大气影响和低分辨率等因素,这些像素光谱会发生畸变。
![]()
你可以使用denoiseNGMeet函数通过使用非局部和全局方法从高光谱数据中去除噪声。
为了提高高光谱数据的空间分辨率,可以使用图像融合方法。该融合方法将来自低分辨率高光谱数据的信息与同一场景的高分辨率多光谱数据或全色图像相结合。这种方法也称为锐化或pansharpening在高光谱图像分析中。泛锐化特别是指高光谱和全色数据之间的融合。你可以使用sharpencnmf利用耦合非矩阵分解方法锐化高光谱数据的函数。
为了补偿大气效果,必须首先校准像素值,即数字(DNs)。您必须通过使用辐射和大气校正方法校准DNs来对数据进行预处理。这个过程改进了像素光谱的解释,并在分析多个数据集(如分类问题)时提供更好的结果。有关辐射校正和大气校正方法的资料,请参阅高光谱数据校正.
在所有高光谱成像应用中,另一个重要的预处理步骤是降维.高光谱数据中的大量波段增加了数据立方体处理的计算复杂度。波段图像的连续特性导致了跨波段的冗余信息。高光谱图像中相邻波段相关性高,导致光谱冗余。你可以去除冗余的波段通过解除相关的波段图像。常用的降低数据立方体光谱维数的方法包括波段选择和正交变换。
这个波段选择方法使用正交空间投影来找到数据立方体中光谱不同和信息最丰富的波段。使用
选择带和移除带分别用于查找最有信息的频带和删除一个或多个频带的函数。正交变换如主成分分析(PCA)和最大噪声分数(MNF),解相关的频带信息,找到主成分频带。
PCA将数据转换到低维空间,并沿输入频带的最大方差找到主分量向量及其方向。主成分按解释的总差异量降序排列。
MNF计算最大信噪比的主成分,而不是方差。MNF变换在从带噪图像中提取主分量方面特别有效。主成分波段是光谱上明显的波段,波段间相关性低。
这个
hyperpca和hypermnf函数分别使用PCA和MNF变换降低数据立方体的光谱维数。您可以使用由简化数据立方体导出的像素光谱进行高光谱数据分析。
光谱分离
在高光谱图像中,每个像素处记录的强度值代表了该像素所在区域的光谱特征。该区域可以是均匀表面或非均匀表面。属于均匀表面的像素称为纯像素.这些纯像素构成了endmembers高光谱数据的分析。
非均匀表面是两个或多个不同的均匀表面的组合。属于异质表面的像素称为混合像素.混合像素的光谱特征是两个或多个端元特征的组合。这种空间异质性主要是由于高光谱传感器的空间分辨率较低。
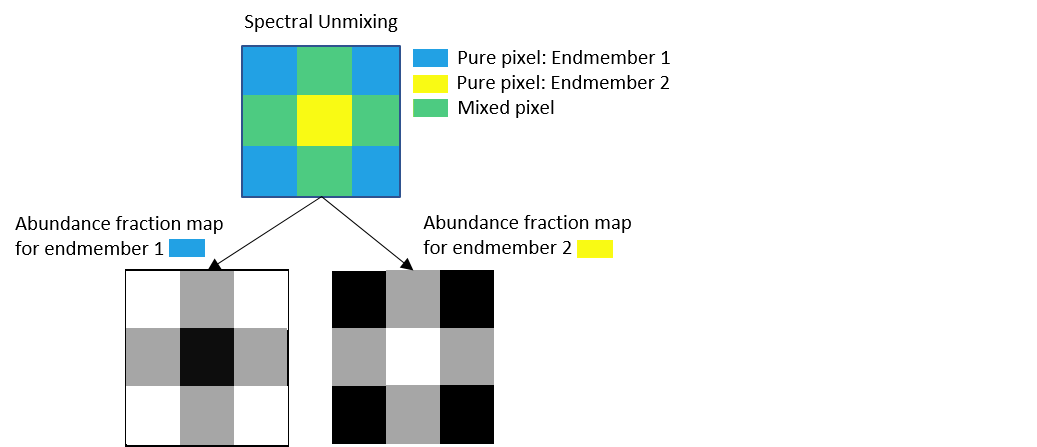
光谱分解是将混合像素的光谱特征分解为它们的组成端元的过程。光谱分离过程包括两个步骤:
Endmember提取—端元的光谱是高光谱数据中的显著特征,可用于高光谱图像的高效光谱分解、分割和分类。基于凸几何的方法,如像素纯度指数(PPI)、快速迭代像素纯度指数(FIPPI)和N-finder (N-FINDR)是一些有效的端元提取方法。
使用
ppi函数使用PPI方法估计端元。PPI方法将像素光谱投影到一个正交空间,并将投影空间中的极值像素识别为端元。这是一种非迭代的方法,其结果依赖于正交投影生成的随机单位向量。为了改进结果,您必须增加用于投影的随机单位向量,这在计算上可能非常昂贵。使用
fippi函数使用FIPPI方法估计端部构件。FIPPI方法是一种迭代方法,它使用自动目标生成过程来估计正交投影的初始单位向量集。该算法比PPI方法收敛速度更快,并且可以识别彼此不同的端成员。使用
nfindr函数使用N-FINDR方法估计端部构件。N-FINDR是一种通过使用像素光谱构造单纯形的迭代方法。该方法假设端部构件形成的单纯形的体积大于任何其他像素组合定义的体积。单纯形体积较大的像素签名集是端成员。
丰度图估计-给定端成员签名,估计每个像素中存在的每个端成员的分数是有用的。您可以为每个端成员生成丰度图,该图表示图像中端成员光谱的分布。通过比较为该像素获得的所有丰度贴图值,可以将该像素标记为属于端成员光谱。
使用
estimateAbundanceLS函数估计每个端成员光谱的丰度图。
光谱匹配
通过执行以下操作来解释像素光谱:光谱匹配光谱匹配通过将端元材料的光谱与一个或多个参考光谱进行比较来确定该材料的类别。参考数据由材料的纯光谱特征组成,可作为光谱库使用。
使用readEcostressSig函数从ECOSTRESS光谱库读取参考光谱文件。然后,您可以计算文件之间的相似性ECOSTRESS库谱和端元谱使用spectralMatch函数。
像素光谱的几何特征和概率分布值是光谱匹配的重要特征。结合几何特征和概率特征可以提高匹配效率。这种组合方法比单独方法具有更高的识别能力,更适合于识别光谱相似的目标(种内)。该表列出了计算谱匹配分数可用的函数。
| 方法 | 描述 |
山姆 |
光谱角度映射器(SAM)根据两个光谱的几何特征匹配它们。SAM度量计算两个光谱特征之间的角度。较小的角度表示两个光谱之间的最佳匹配。此度量对照明变化不敏感。 |
sid |
光谱信息发散(SID)是根据两个光谱的概率分布来匹配的。该方法是一种有效的混合像素光谱识别方法。低SID值表明两个光谱具有较高的相似性。 |
西德萨姆 |
SID和SAM的组合。与SID和SAM单独比较,SID-SAM方法具有更好的识别能力。最低分数意味着两个光谱之间的相似性更高。 |
jmsam |
Jeffries–Matusita(JM)距离和SAM的组合。较低的距离值意味着两个光谱之间的相似性较高。该方法在识别光谱近距离目标时特别有效。 |
ns3 |
归一化光谱相似性分数(NS3),结合了欧几里德距离和SAM。较低的距离值意味着两个光谱之间的相似性较高。该方法具有很高的分辨能力,但需要大量的参考数据才能获得较高的精度。 |
应用程序
高光谱图像处理应用包括分类、目标检测、异常检测和材料分析。
通过分解和光谱匹配对高光谱图像中的每个像素进行分割和分类。关于分类的例子,请参见基于最大丰度分类的高光谱图像分析和基于库特征和SAM的高光谱图像分类.
通过将目标材料的已知光谱特征与高光谱数据中的像素光谱相匹配,可以执行目标检测。例如,请参阅基于谱特征匹配的目标检测.
您还可以使用高光谱图像处理进行异常检测和材料分析,如植被分析。
另见
应用程序
功能
相关话题
你也可以从以下列表中选择一个网站:
