主要内容
estimateLidarCameraTransform
估计从激光雷达传感器到摄像机的刚性转换
语法
描述
tform= estimateLidarCameraTransform (ptCloudPlanes,imageCorners3d)
例子
估计从激光雷达到相机的刚性变换
使用从激光雷达传感器和摄像机校准参数捕获的数据估计从激光雷达传感器到摄像机的刚性转换。使用以下三个步骤:
将数据加载到工作区中。
从图像和点云数据中提取所需的特征。
利用提取的特征估计刚性变换。
加载数据
加载图像并将云数据指向工作区。
imageDataPath = fullfile (toolboxdir (激光雷达的),“lidardata”,...低成本航空的,“vlp16”,“图片”);imd = imageDatastore (imageDataPath);imageFileNames = imds.Files;ptCloudFilePath = fullfile (toolboxdir (激光雷达的),“lidardata”,...低成本航空的,“vlp16”,“pointCloud”);pcd = fileDatastore (ptCloudFilePath,“ReadFcn”, @pcread);pcFileNames = pcds.Files;
将摄像机校准文件加载到工作区中。
cameraIntrinsicFile = fullfile (imageDataPath,“calibration.mat”);内在=负载(cameraIntrinsicFile);
特征提取
指定棋盘的大小,单位为毫米。
squareSize = 81;
估计图像的棋盘角坐标。
[imageCorners3d, planeDimension imagesUsed] = estimateCheckerboardCorners3d (...imageFileNames、intrinsic.cameraParams squareSize);
根据使用的图像过滤点云。
pcFileNames = pcFileNames (imagesUsed);
使用平面参数检测过滤点云中的棋盘平面planeDimension.
[lidarCheckerboardPlanes, framesUsed] = detectRectangularPlanePoints (...pcFileNames planeDimension,“RemoveGround”,真正的);
提取图像、棋盘角和点云,在其中您检测到的特征。
imagFileNames = imageFileNames (imagesUsed);imageFileNames = imageFileNames (framesUsed);pcFileNames = pcFileNames (framesUsed);imageCorners3d = imageCorners3d (:,:, framesUsed);
估计转换
使用来自点云的棋盘平面和来自图像的三维棋盘角点估计变换。
[tform、错误]= estimateLidarCameraTransform (lidarCheckerboardPlanes...imageCorners3d,“CameraIntrinsic”, intrinsic.cameraParams);
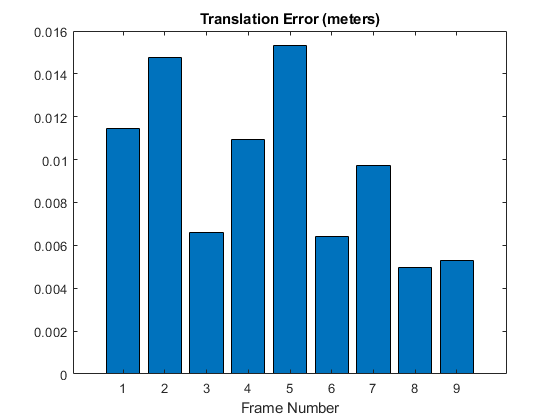
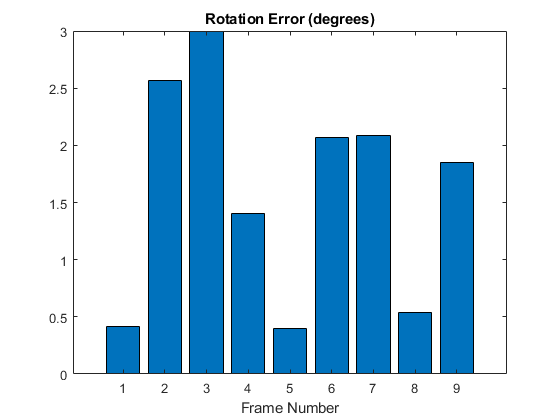
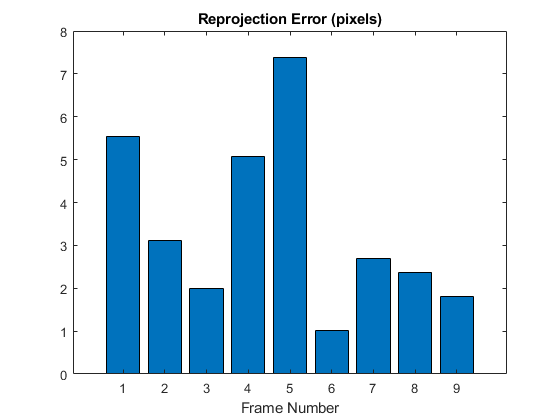
将平移、旋转和重投影误差显示为条形图。
图酒吧(errors.TranslationError)包含(的帧数)标题(“翻译错误(米))
图酒吧(errors.RotationError)包含(的帧数)标题(的旋转误差(度))
图酒吧(errors.ReprojectionError)包含(的帧数)标题(“Reprojection错误(像素)”)
输入参数
输出参数
另请参阅
功能
bboxCameraToLidar|detectRectangularPlanePoints|estimateCheckerboardCorners3d|fuseCameraToLidar|projectLidarPointsOnImage
主题
介绍了R2020b
你也可以从以下列表中选择一个网站: