飞机不稳定极点
这个例子显示了如何控制不稳定的飞机饱和执行。
对于控制使用显式MPC控制器相同的植物的实例,请参见某型飞机明确MPC控制与不稳定极点。
定义飞机模型
飞行器的线性开环动态模型具有以下状态空间矩阵:
A = [-0.0151 -60.5651 0 -32.174;-0.0001 -1.3411 0.9929 0;0.00018 43.2541 -0.86939 0;0 0 1 0];B = [-2.516 -13.136;-0.1689 -0.2514;-17.251 -1.5766;0 0];C = [0 1 0 0;0 0 0 1]; D = [0 0; 0 0];
建立工厂,并作为零指定的初始状态。
植物= SS(A,B,C,d);X0 =零(4,1);
操纵变量是在电梯和襟副翼角度。攻击和桨距角测量的输出来调节。
该系统的开环反应是不稳定的。
极(厂)
ANS = -7.6636 + 0.0000i 5.4530 + 0.0000i -0.0075 + 0.0556i -0.0075 - 0.0556i
指定控制器约束
两个操作量的+/- 25度之间的约束。自建厂以来,输入和输出是不同量级的,你还可以使用比例因子,以方便MPC调整。比例因子的典型的选择是上/下限或工作范围。
MV =结构(“最低”{-25、-25},“最大”,{25,25},'比例因子',{50,50});
两种植物的产量都有限制,以限制在第一个预测层的嫩枝。您还可以为输出指定比例因子。
OV =结构(“最低”,{[ - 0.5; -Inf],[ - 100; -Inf]},...“最大”,{[0.5; Inf文件],[100; Inf文件]},...'比例因子',{1200});
指定控制器整重量
控制任务是获得零偏移的分段常数引用,同时避免不稳定的输入饱和。因为MV和OV变量已经在MPC控制器中进行了缩放,所以MPC的权值是无量纲的,并应用于缩放的MV和OV值。在本例中,您使用相同的OV权值对两个输出进行同等的惩罚。
权重=结构('MV',[0 0],'MVRate'(0.1 - 0.1),机汇的[10 10]);
创建MPC控制器
使用指定的植物模型、采样时间和范围创建MPC控制器。
TS = 0.05;%样品时间P = 10;%预测地平线m = 2时;%控制范围mpcobj = MPC(植物中,Ts,P,M,重量,MV,OV);
模拟使用的Simulink金宝app
要运行这个例子,Simulink®的需要。金宝app
如果〜mpcchecktoolboxinstalled('金宝appSIMULINK')DISP(的金宝appSimulink(R)需要运行这个例子“。)返回结束
模拟在Simulink线性植物模型的闭环控制。金宝app要做到这一点,对于MPC控制器块,设置MPC控制器属性mpcobj。
MDL =“mpc_aircraft”;open_system(MDL)SIM(MDL)
- >转换模型,以离散时间。- >加入到测量的输出信道#1假设输出干扰被集成白噪声。- >加入到测量的输出信道#2假设输出干扰被集成白噪声。- >的“MPC”对象的“Model.Noise”属性是空的。假设在每个测得的输出信道的白噪声。

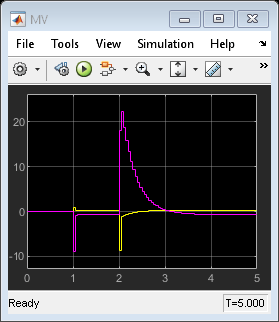

闭环反应表现出良好的设定值跟踪性能。
参考文献
[1] P. Kapasouris,M. Athans,和G.斯坦,“设计的反馈控制系统,用于与致动器饱和不稳定植物”,PROC。IFAC SYMP。非线性控制系统设计,Pergamon出版社,pp.302--307,1990年
bb0 A. Bemporad, A. Casavola,和E. Mosca,“通过预测参考管理实现线性约束系统的非线性控制”,IEEE®跨。自动控制, AC-42卷,第2期。3,第340-349页,1997年。
bdclose(MDL)
也可以看看
相关的话题
你也可以从以下列表中选择一个网站:
