坐标变换转换
转换到指定的坐标变换表示
- 图书馆:
机器人系统工具箱/工具
导航工具箱/工具
ROS工具箱/工具
描述
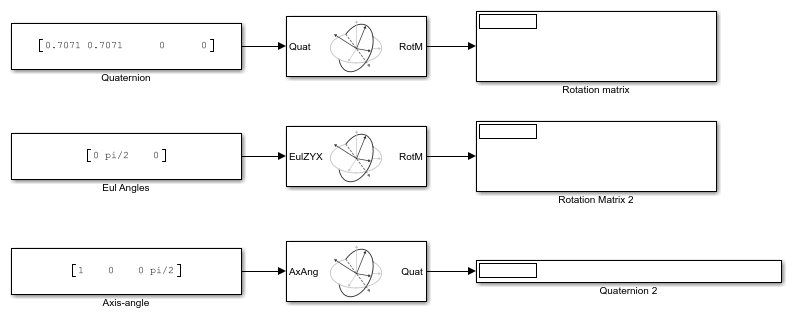
该坐标变换转换块转换的坐标从输入表示变换到指定的输出表示。输入和输出的表示使用以下几种形式:
轴角(
AxAng) -[X Yž的2θ欧拉角(
EUL) -[Z Y X],[旋转Z Y Z], 要么[X Y Z]齐次变换(
TForm的) - 4×4矩阵四元(
桔) -[瓦特X Y Z]旋转矩阵(
RotM) - 3×3矩阵平移向量(
TrVec) -[X Y Z]
所有的载体必须是列向量。
为了适应陈述仅包含位置或方向的信息(TrVec要么EUL,例如)时,可以指定两个输入或输出来处理所有的变换信息。当您选择齐次变换为输入或输出,可选显示TrVec输入/输出端口参数可以在阻挡掩模被选择来切换所述多个端口。
端口
输入
输出参数
参数
模型的例子
扩展功能
也可以看看
介绍了在R2017b
您还可以选择从下面的列表中的网站: