主要内容
dubinsPathSegment
连接两个姿态的杜宾斯路径段
描述
的dubinsPathSegment对象保存了Dubins路径段的信息,该路径段将两个姿势连接为三个运动序列。运动选项是:
直
最大转向时左转
最大转向时右转
创建
生成dubinsPathSegment对象时,使用连接函数使用dubinsConnection对象:
dubPathSeg=连接(connectionObj,开始,目标)
要明确定义一个路径段:
dubPathSeg= dubinsPathSegment (connectionObj,开始,目标,motionLengths,motionTypes)
属性
例子
使用Dubins连接路径连接姿势
创建一个dubinsConnection对象。
dubConnObj = dubinsConnection;
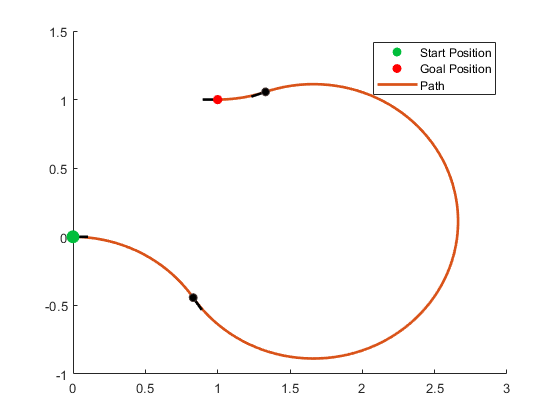
定义开始姿势和目标姿势为[x y theta]向量。
startPose = [0 0 0];goalPose = [11 pi];
计算一个有效的路径段来连接姿态。
[pathSegObj, pathCosts] = connect(dubConnObj,startPose,goalPose);
显示生成的路径。
表演(pathSegObj {1})
扩展功能
R2019b引入
您也可以从以下列表中选择一个网站: