主要内容
显示
可视化道路段
描述
例子
连接构成使用杜宾连接路径
创建一个dubinsConnection对象。
dubConnObj = dubinsConnection;
定义启动和目标提出了(x yθ)向量。
startPose = (0 0 0);goalPose =(1 1π);
计算出一个有效的路径段连接构成。
[pathSegObj, pathCosts] =连接(dubConnObj、startPose goalPose);
显示生成的路径。
表演(pathSegObj {1})
修改连接类型Reeds-Shepp路径
创建一个reedsSheppConnection对象。
reedsConnObj = reedsSheppConnection;
定义启动和目标提出了(x yθ)向量。
startPose = (0 0 0);goalPose =(1 1π);
计算出一个有效的路径段连接构成。
[pathSegObj, pathCosts] =连接(reedsConnObj、startPose goalPose);
显示生成的路径。注意的方向。
表演(pathSegObj {1})

pathSegObj {1} .MotionTypes
ans =1 x5单元格{' L '} {‘R’} {‘L’} {' N '} {' N '}
pathSegObj {1} .MotionDirections
ans =1×51 1 1 1 1
禁用这个特定的运动序列在一个新的连接对象。减少MinTurningRadius如果该机器人更容易操作。增加反向成本减少扭转方向的可能性。连接构成了一条不同的道路。
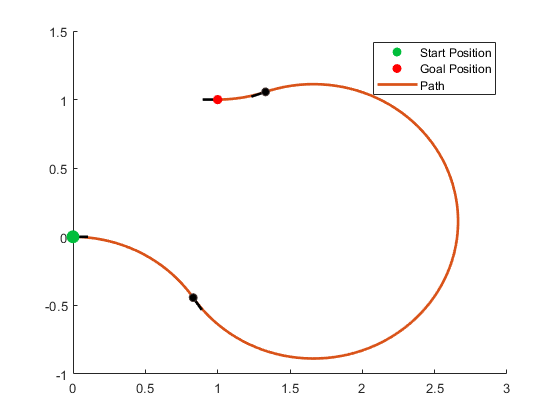
reedsConnObj = reedsSheppConnection (“DisabledPathTypes”,{“LpRnLp”});reedsConnObj。MinTurningRadius = 0.5;reedsConnObj。ReverseCost = 5;[pathSegObj, pathCosts] =连接(reedsConnObj、startPose goalPose);pathSegObj {1} .MotionTypes
ans =1 x5单元格{' L '} {S} {‘L’} {' N '} {' N '}
表演(pathSegObj {1}) xlim (1.5 [0]) ylim (1.5 [0])

杜宾路径插入的姿势
创建一个dubinsConnection对象。
dubConnObj = dubinsConnection;
定义启动和目标提出了(x yθ)向量。
startPose = (0 0 0);goalPose =(1 1π);
计算出一个有效的路径段连接构成。
[pathSegObj, pathCosts] =连接(dubConnObj、startPose goalPose);
显示生成的路径。
表演(pathSegObj {1})

沿着路径插入的姿势。得到一个姿势每0.2米,包括之间的转换。
长度= pathSegObj {1} . length;提出了=插入(pathSegObj{1}, 0:0.2:长度)
提出了=32×30 0 0 0.1987 -0.0199 6.0832 0.3894 -0.0789 5.8832 0.5646 -0.1747 5.6832 0.7174 -0.3033 5.4832 0.8309 -0.4436 5.3024 0.8418 -0.4595 5.3216 0.9718 -0.6110 5.5216 1.1293 -0.7337 5.7216 1.3081 -0.8226 5.9216⋮
使用箭袋函数来绘制这些姿势。
箭袋(姿势(:1),姿势(:,2),因为(姿势(:,3)),罪(姿势(:,3)),0.5)

输入参数
介绍了R2019b