主要内容
ReedScheppConnection
钢筘-钢筘-钢筘-钢筘-钢筘-钢筘-钢筘-钢筘-钢筘-钢筘-钢筘-钢筘-钢筘路径连接类型
描述
这个ReedSheppc连接对象保存用于计算芦苇茎段对象在姿势之间连接。簧片Shepp路径段将两个姿势连接为五个动作的序列。运动选项包括:
直的
最大转向时左转
在最大转向时右转
不许动
Reeds-Shepp路径段支持向前和向后运动。金宝app
使用此连接对象可定义车辆运动模型的参数,包括最小转弯半径和路径类型选项。若要使用此连接类型在姿势之间生成路径段,请调用连接作用
创造
性质
目标函数
连接 |
给定连接类型的连接姿势 |
例子
使用ReedShepp连接路径连接姿势
创建一个ReedScheppConnection对象
reedsConnObj=reedsSheppConnection;
将开始姿势和目标姿势定义为[xyθ]向量。
startPose=[0];goalPose=[1 pi];
计算有效的路径段以连接姿势。
[pathSegObj,pathCosts]=连接(reedsConnObj,startPose,goalPose);
显示生成的路径。
显示(路径segobj{1})
修改簧片Shepp路径的连接类型
创建一个ReedScheppConnection对象
reedsConnObj=reedsSheppConnection;
将开始姿势和目标姿势定义为[xyθ]向量。
startPose=[0];goalPose=[1 pi];
计算有效的路径段以连接姿势。
[pathSegObj,pathCosts]=连接(reedsConnObj,startPose,goalPose);
显示生成的路径。注意转弯的方向。
显示(路径segobj{1})

pathSegObj{1}.MotionTypes
ans=1x5电池{'L'}{'R'}{'L'}{'N'}{'N'}
pathSegObj{1}.MotionDirections
ans=1×51 -1 1 1 1
在新连接对象中禁用此特定运动序列。减少明图宁格拉迪乌斯如果机器人更灵活。增加反向成本以减少使用反向方向的可能性。再次连接姿势以获得不同的路径。
reedsConnObj=reedsSheppConnection(“禁用路径类型”,{“LpRnLp”}); reedsConnObj.MinTurningRadius=0.5;reedsConnObj.ReverseCost=5;[pathSegObj,pathCosts]=连接(reedsConnObj,startPose,goalPose);pathSegObj{1}.MotionTypes
ans=1x5电池{'L'}{'S'}{'L'}{'N'}{'N'}
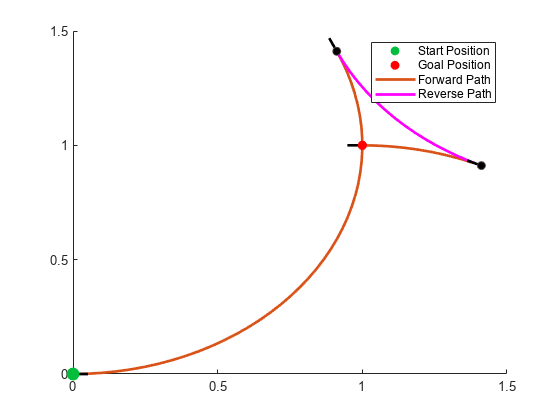
show(pathSegObj{1})xlim([01.5])ylim([01.5])

扩展能力
在R2019b中引入
您还可以从以下列表中选择网站: