主要内容
reedsSheppPathSegment
reed - shepp路径段连接两个姿态
描述
的reedSheppPathSegment对象持有reed - shepp路径段的信息,以连接姿态之间。reed - shepp路径段将两个姿态连接为五种运动类型的序列。动议选项如下:
直的
最大转向时左转
以最大方向右转
没有运动
创建
生成一个reedSheppPathSegment对象,使用连接函数与一个reedssheppconnection.目的:
reedsPathSegObj =连接(connectionObj、启动、目标)使用指定的连接类型对象连接起始姿态和目标姿态。
要明确定义一个路径段:
reedsPathSegObj = reedsSheppPathSegment (connectionObj、启动目标,motionLengths motionTypes)指定reed - shepp连接类型、起始和目标姿态以及相应的运动长度和类型。这些值被设置为对象中相应的属性。
属性
例子
使用ReedSshpp连接路径连接姿势
创建一个reedssheppconnection.目的。
reedsConnObj = reedsSheppConnection;
定义开始和目标姿势(x yθ)向量。
startPose = [0 0 0];目标姿态= [1 1 pi];
计算一个有效的路径段连接的姿态。
[pathSegObj, pathCosts] =连接(reedsConnObj、startPose goalPose);
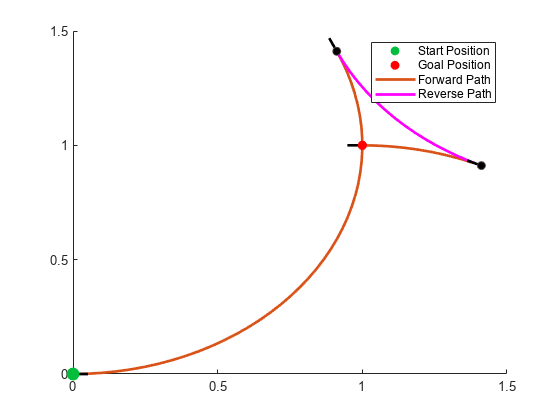
显示生成的路径。
show(pathsegobj {1})
参考
J. A. reed和L. A. Shepp。"既能前进又能后退的汽车的最优路径"太平洋数学杂志。卷。145,第290号,第290页,第367-393页。
扩展功能
介绍了R2019b
您还可以从以下列表中选择一个网站: