主要内容
杜宾连接
Dubins路径连接类型
描述
这杜宾连接对象保存用于计算a的信息杜巴径段在姿势之间连接的路径段。Dubins路径段将两个姿势连接为三个运动序列。运动选项是:
直的
左转最大转向
右转以最大转向
杜宾路径段仅允许在向前方向上运动。
使用此连接对象定义机器人运动模型的参数,包括最小转换半径和路径类型的选项。要使用此连接类型生成POSE之间的路径段,请调用连接功能。
创建
描述
dubconnobj.=杜宾逊连接
dubconnobj.=杜宾斯连接(名称,价值)
特性
对象功能
连接 |
为给定连接类型连接姿势 |
例子
使用Dubins连接路径连接姿势
创建一个杜宾连接目的。
dubconnobj = dubinsconnection;
定义开始和目标姿势[x y theta]vectors。
expilepose = [0 0 0];守门= [1 1 pi];
计算有效的路径段以连接姿势。
[pathsegobj,pathcosts] = connect(dubconnobj,inightings,legent);
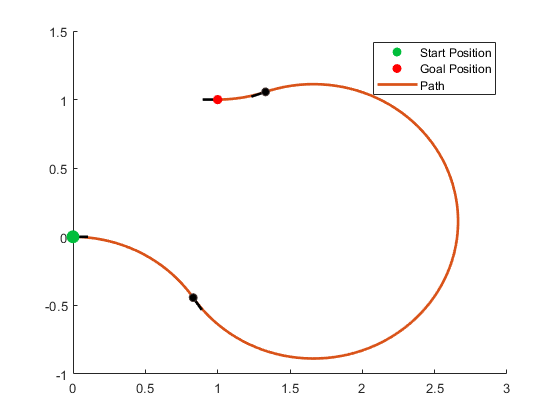
显示生成的路径。
show(pathsegobj {1})
修改Dubins Path的连接类型
创建一个杜宾连接目的。
dubconnobj = dubinsconnection;
定义开始和目标姿势[x y theta]vectors。
expilepose = [0 0 0];守门= [1 1 pi];
计算有效的路径段以连接姿势。
pathsegobj = connect(dubconnobj,inightings,legeposit);
显示生成的路径。注意转弯的方向。
show(pathsegobj {1})
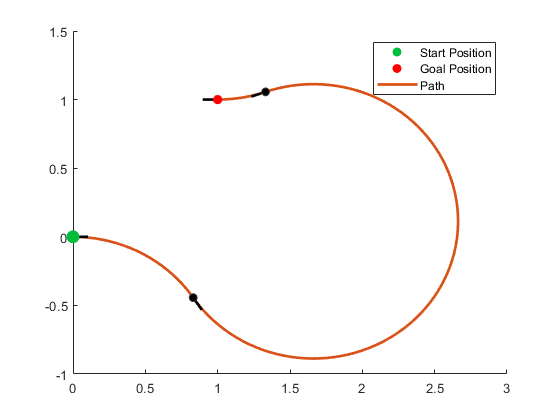
pathsegobj {1} .motiontypes
ans =.1x3细胞{'r'} {'l'} {'r'}
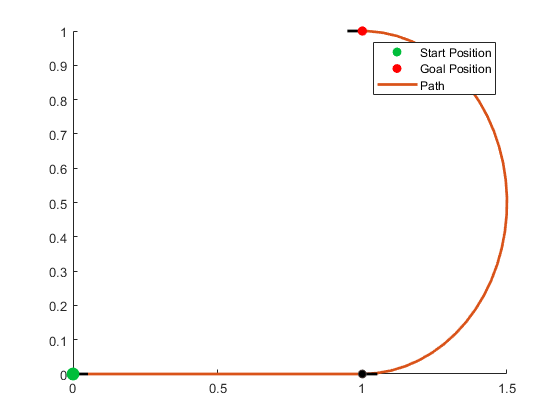
在新连接对象中禁用此特定运动序列。减少MinturningRadius.如果机器人更具可动性。再次连接姿势以获得不同的路径。
dubconnobj = dubinsconnection('残疾人术',{'rlr'});dubconnobj.minturningradius = 0.5;[pathsegobj,pathcosts] = connect(dubconnobj,inightings,legent);pathsegobj {1} .motiontypes
ans =.1x3细胞{'l'} {'s'} {'l'}
show(pathsegobj {1})
参考
[1] Shkel,Andrei M.和Vladimir Lumelsky。“杜宾斯的分类套装。”机器人和自主系统。卷。34,2,2001,第4,2001页,第179-202页。
扩展能力
在R2019B中介绍
您还可以从以下列表中选择一个网站: