主要内容
setOccupancy
设置位置占用值
语法
描述
validPts= setoccupancy(___)n-Element矢量逻辑值,指示输入坐标是否在地图限制内。
setoccupancy(通过指定世界坐标中的左下角位置来指定占用值矩阵。地图,左下方,inputMatrix)
setoccupancy(通过在本地坐标中指定左下角位置来分配占用值矩阵。地图,左下方,inputMatrix“本地”)
setoccupancy(通过指定网格索引中的左上角单元格索引和矩阵大小来赋值一个占用值矩阵。地图,topLeft,inputMatrix,'网格')
例子
创建和修改占用地图
创建一个10×10米的空映射。
地图=占领(10,10,10);
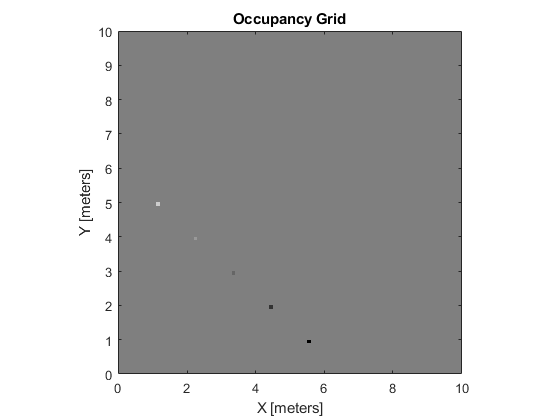
更新特定世界位置的占用率与新的概率值,并显示地图。
x = (1.2;2.3;3.4;4.5;5.6);y = (5.0;4.0;3.0;2.0;1.0); pvalues = [0.2; 0.4; 0.6; 0.8; 1]; updateOccupancy(map,[x y],pvalues) figure show(map)
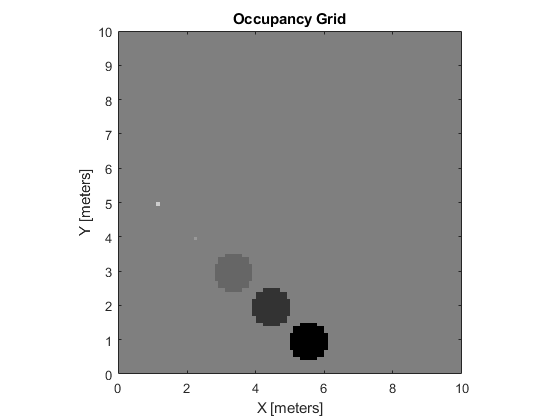
将被占用的区域以0.5米为半径充气。较大的占用值将覆盖较小的占用值。
充气(图0.5)图显示(图)
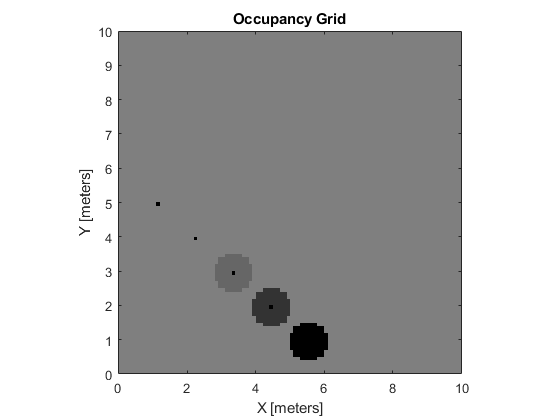
从世界地点获取网格位置。
Ij = world2grid(map,[x y]);
设置网格位置的占用值。
setOccupancy(地图,ij(5、1),'网格')图显示(地图)
输入参数
输出参数
限制
占用值的分辨率有限,为±0.001。值存储为int16使用对数概率表示。这种数据类型限制了分辨率,但在MATLAB中存储大型地图时节省了内存®。当调用setOccupancy然后getOcupancy.,返回的值可能不等于您设置的值。有关更多信息,请参见中的log-odds表示部分占用网格。
介绍了R2019b
您还可以从以下列表中选择一个网站: