主要内容
显示
显示图中的网格值
描述
例子
创建和修改占用地图
创建一个10 * 10米大小的空地图。
地图=占领(10,10,10);
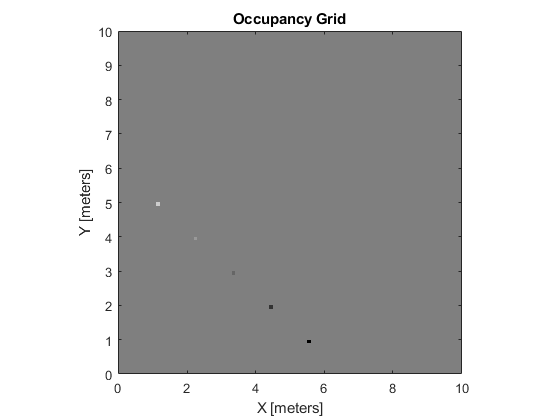
使用新的概率值更新特定世界位置的占用,并显示地图。
x = [1.2;2.3;3.4;4.5;5.6];y = [5.0;4.0;3.0;2.0;1.0]; pvalues = [0.2; 0.4; 0.6; 0.8; 1]; updateOccupancy(map,[x y],pvalues) figure show(map)
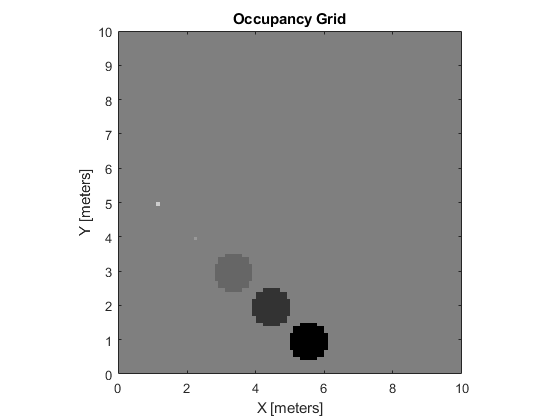
将占用区域膨胀半径为0.5米。较大的占用值覆盖较小的值。
充气(地图,0.5)图显示(地图)
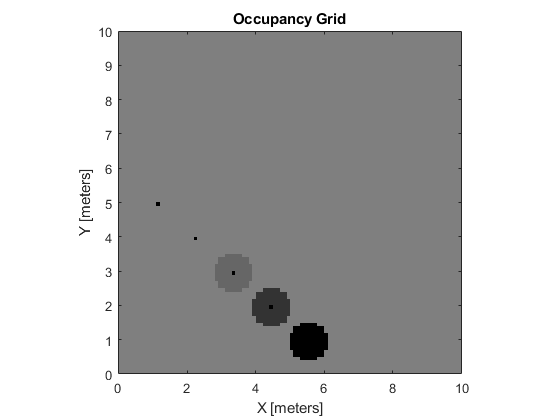
从世界位置获取网格位置。
ij = world2grid(map,[x y]);
设置网格位置的占用值。
SetoCcumancy(地图,IJ,ONE(5,1),“网格”图显示(图)
将PGM图像转换为映射
将包含ROS映射的便携式Graymap(PGM)文件转换为占领子在MATLAB中使用。
使用导入图像imread。将图像裁剪到Playpen地区。
image = imread('playpen_map.pgm');Imagecropped =图像(750:1250,750:1250);imshow(Imagecropped)
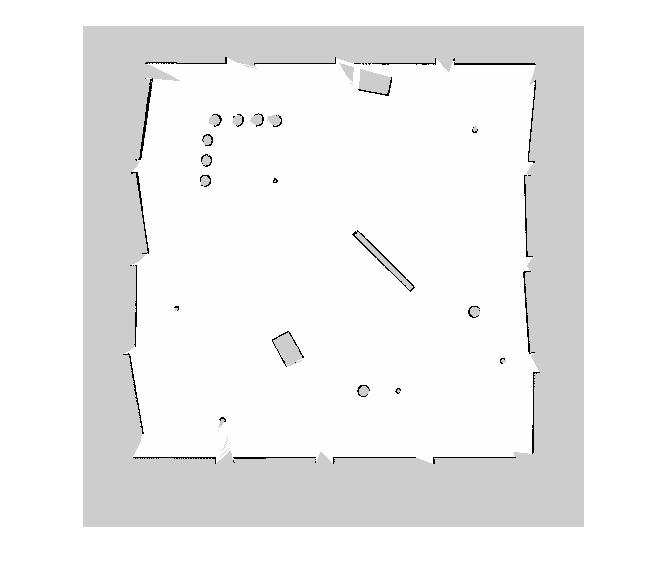
PGM值表示为0至255uint8.。通过将裁剪图像转换为来标准化这些值双倍的每个细胞除以255。这张图片显示的障碍值接近于0。1减去归一化后的图像,得到占用值,其中1表示占用空间。
imageNorm = (imageCropped) / 255年翻一番;imageOccupancy = 1 - imageNorm;
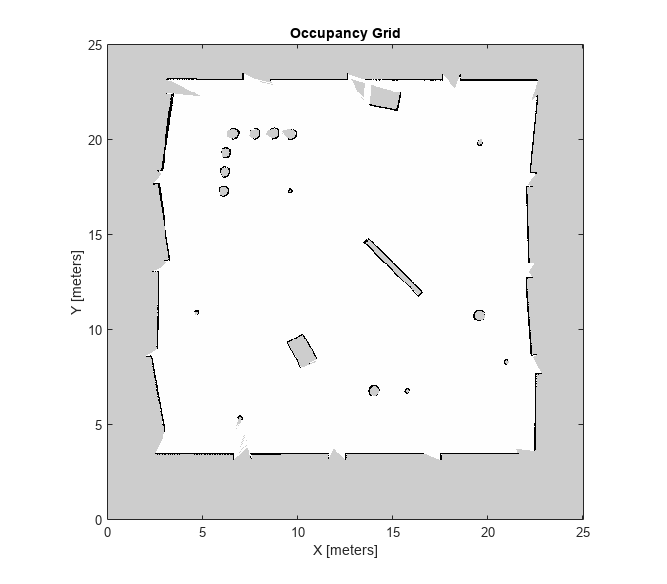
创造占领子对象使用调整后的地图图像。进口地图分辨率为每米20个单元格。
地图=占领扬声器(ImageCcupancy,20);显示地图)
输入参数
输出
也可以看看
在R2019B中介绍
您还可以从以下列表中选择一个网站: