updateOccupancy
集成在地点概率意见
描述
例子
创建和修改入住地图
创建10 m乘10米空映射。
MAP = occupancyMap(10,10,10);
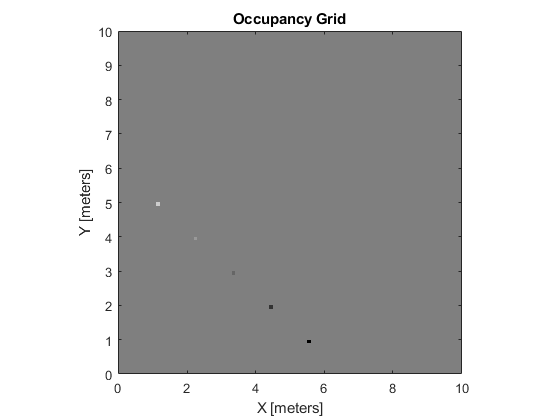
更新与特定的概率值的世界位置的占用和显示地图。
X = [1.2;2.3;3.4;4.5;5.6];Y = [5.0;4.0;3.0;2.0;1.0]; pvalues = [0.2 0.4 0.6 0.8 1]; updateOccupancy(map,[x y],pvalues) figure show(map)
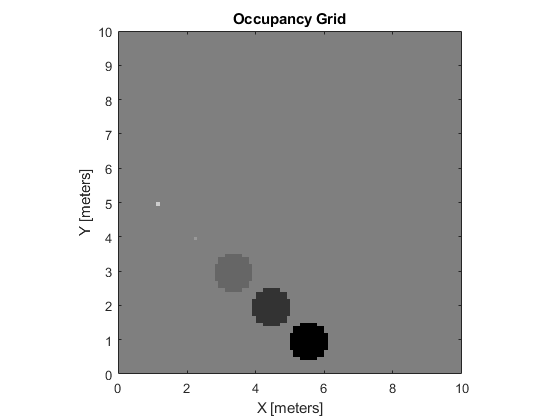
充气通过0.5μm的半径占用区域。较大的占用值覆盖较小的值。
膨胀(地图,0.5)图显示(地图)
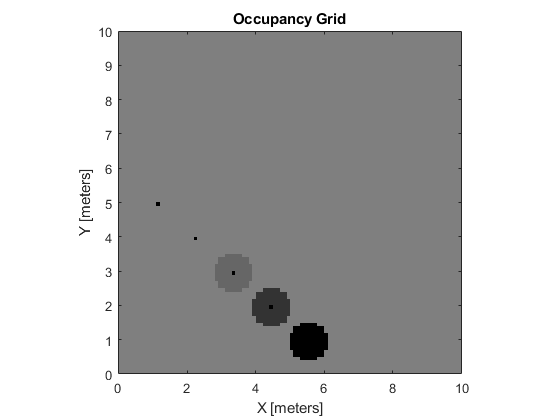
得到世界的位置网格位置。
IJ = world2grid(地图,[X Y]);
定格位置上占据的位置。
setOccupancy(地图,IJ,一(5,1),'格')图显示(地图)
输入参数
更多关于
反向传感器型号
逆传感器模型确定的值是如何沿着从一系列传感器读数,以在地图中的障碍物的射线设置。为NaN范围值将被忽略。范围值大于maxrange不更新。
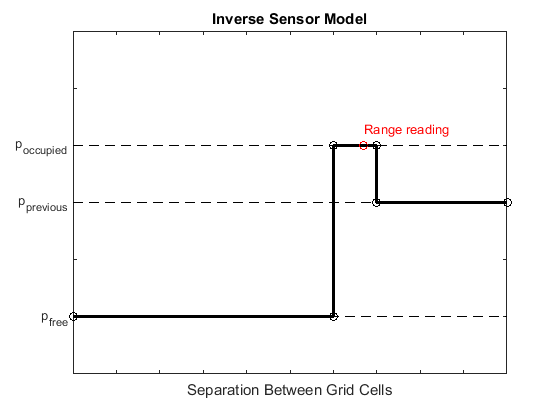
包含范围读数网格位置与被占领的概率更新。阅读前位置与免费的概率更新。不更新后读的所有位置。
介绍了在R2019b
您还可以选择从下面的列表中的网站: