基于问题的分段线性质量-弹簧系统的锥规划能量最小化gydF4y2Ba
这个例子展示了如何使用基于问题的方法来寻找平衡位置的质量-弹簧系统悬挂在两个锚点。弹簧具有分段线性拉力。该系统包括gydF4y2Ba 两个维度的群众。大量的gydF4y2Ba 连接到弹簧上gydF4y2Ba 和gydF4y2Ba .泉水gydF4y2Ba 和gydF4y2Ba 也连接到单独的锚点。在这种情况下,弹簧的零力长度gydF4y2Ba 是正长度gydF4y2Ba ,弹簧产生力gydF4y2Ba 拉伸到长度gydF4y2Ba .问题是找到质量的最小势能配置,其中潜在的能量来自重力和拉伸非线性弹簧。均衡发生在最小能量配置处。gydF4y2Ba
这张图显示了五个弹簧和四个物体悬挂在两个锚点上。gydF4y2Ba

质量的势能gydF4y2Ba 在高度gydF4y2Ba 是gydF4y2Ba ,在那里gydF4y2Ba 是地球上的引力常数。同样,一个带有弹簧常数的理想线性弹簧的势能gydF4y2Ba 拉伸长度gydF4y2Ba 是gydF4y2Ba .在目前的模型中,弹簧不是理想的,但它有一个非零的静止长度gydF4y2Ba .gydF4y2Ba
这个例子的数学依据来自Lobo,Vandenberghe,Boyd和LebetgydF4y2Ba[1]gydF4y2Ba.有关此示例的基于求解器的版本,请参见gydF4y2Ba分段线性质量-弹簧系统能量最小化的锥规划,基于求解器gydF4y2Ba.gydF4y2Ba
数学公式gydF4y2Ba
质量的位置gydF4y2Ba 是gydF4y2Ba ,以横坐标表示gydF4y2Ba 和垂直坐标gydF4y2Ba .大量的gydF4y2Ba 由重力引起的势能是gydF4y2Ba .弹簧的势能gydF4y2Ba 是gydF4y2Ba ,在那里gydF4y2Ba 是质量之间的弹簧的长度gydF4y2Ba 和质量gydF4y2Ba .以锚点1为质量0的位置,锚点2为质量的位置gydF4y2Ba .前面的能量计算表明弹簧的势能gydF4y2Ba 是gydF4y2Ba
.gydF4y2Ba
将这个势能问题重新表述为二阶锥规划问题需要引入一些新的变量,如Lobo中所述gydF4y2Ba[1]gydF4y2Ba.创建变量gydF4y2Ba 等于术语的平方根gydF4y2Ba .gydF4y2Ba
让gydF4y2Ba 为单位列向量gydF4y2Ba .然后gydF4y2Ba .这个问题变得gydF4y2Ba
(1)gydF4y2Ba
现在考虑gydF4y2Ba 作为一个自由矢量变量,未通过以前的等式给出gydF4y2Ba .纳入之间的关系gydF4y2Ba 和gydF4y2Ba 在新的锥限制gydF4y2Ba
(2)gydF4y2Ba
根据需要,目标函数尚未在其变量中线性gydF4y2BaConeprog.gydF4y2Ba.引入一个新的标量变量gydF4y2Ba
.请注意,不平等gydF4y2Ba
等于不等式吗gydF4y2Ba
.(3)gydF4y2Ba
现在的问题是最小化gydF4y2Ba
(4)gydF4y2Ba
受锥限制的影响gydF4y2Ba 和gydF4y2Ba (2)和附加的圆锥约束(3)。圆锥约束(3)确保gydF4y2Ba .因此,问题(4)等价于问题(1)。gydF4y2Ba
问题(4)的目标函数和锥形约束适用于解决方案gydF4y2BaConeprog.gydF4y2Ba.gydF4y2Ba
MATLAB®配方gydF4y2Ba
定义六个春季常量gydF4y2Ba ,六个长常数gydF4y2Ba ,五个质量gydF4y2Ba .gydF4y2Ba
K = 40 *(1:6);l = [1 1/2 1 2 1 1/2];m = [2 1 3 2 1];g = 9.807;gydF4y2Ba
定义对应于数学问题变量的优化变量。为简单起见,将锚点设置为两个虚拟质量点gydF4y2Bax (1:)gydF4y2Ba和gydF4y2Bax(最终,:)gydF4y2Ba.该配方允许每个弹簧在两个质量之间伸展。gydF4y2Ba
Nmass = length(m) + 2;gydF4y2Ba% k和l有nmass-1元素gydF4y2Ba% m有nmass - 2个元素gydF4y2Bax = optimvar (gydF4y2Ba“x”gydF4y2Ba[nmass 2]);t = optimvar (gydF4y2Ba“t”gydF4y2Banmass-1,gydF4y2Ba下界的gydF4y2Ba, 0);y = optimvar (gydF4y2Ba'是'gydF4y2Ba,gydF4y2Ba下界的gydF4y2Ba, 0);gydF4y2Ba
创建一个优化问题,并将目标函数设为(4)中的表达式。gydF4y2Ba
prob = OptimProblem;obj = dot(x(2:(端-1),2),m)* g + y;prob.objective = obj;gydF4y2Ba
创建表达式(2)对应的锥约束。gydF4y2Ba
Conecons = Optimineq(Nmass - 1);gydF4y2Ba为gydF4y2Ba2 = 1:(nmass-1) conecons (ii) =规范(x (2 + 1,:) - x (ii,:)) - l (ii) < =√6 (2 / k (ii)) * t (2);gydF4y2Ba结束gydF4y2Baprob.constraints.conecons = conecons;gydF4y2Ba
指定锚点gydF4y2Baanchor0gydF4y2Ba和gydF4y2BaanchorngydF4y2Ba.创建等式约束,指定两个虚拟端质量位于锚点。gydF4y2Ba
anchor0 = [0 5];锚= [5 4];Anchorcons = Optimeq(2,2);锚围(1,:) = x(1,:) == anchor0;锚围(2,:) = x(结束,:) ==凤洋;prob.constraints.anchorcons =锚杆;gydF4y2Ba
创建表达式(3)对应的锥约束。gydF4y2Ba
YCONE = NARM([2 * T;(1-Y)])<= 1 + y;prob.constraints.ycone = Ycone;gydF4y2Ba
解决问题gydF4y2Ba
问题的表述已经完成了。通过打电话来解决问题gydF4y2Ba解决gydF4y2Ba.gydF4y2Ba
[SOL,FVAL,EFLAG,输出] =求解(prob);gydF4y2Ba
用coneprog解决问题。找到最优解。gydF4y2Ba
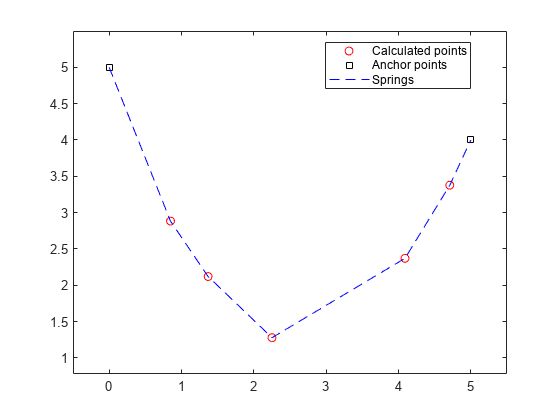
绘制解决方案点和锚点。gydF4y2Ba
情节(sol.x (2: (nmass-1), 1), sol.x (2: (nmass-1), 2),gydF4y2Ba“罗”gydF4y2Ba) 抓住gydF4y2Ba在gydF4y2Ba绘图(ΦX(1,1),Sol.x(终端,1)],[Sol.x(1,2),Sol.x(END,2)],gydF4y2Ba“ks”gydF4y2Ba)情节(sol.x (: 1) sol.x (:, 2),gydF4y2Ba'B--'gydF4y2Ba)传说(gydF4y2Ba'计算点'gydF4y2Ba,gydF4y2Ba“锚点”gydF4y2Ba,gydF4y2Ba'springs'gydF4y2Ba,gydF4y2Ba'地点'gydF4y2Ba,gydF4y2Ba“最佳”gydF4y2Ba) xlim ([sol.x (1,1) -0.5, sol.x(结束,1)+ 0.5])ylim ([min (sol.x(:, 2)) -0.5,马克斯(sol.x (:, 2)) + 0.5])gydF4y2Ba离开gydF4y2Ba
您可以更改参数的值gydF4y2Ba米gydF4y2Ba,gydF4y2BalgydF4y2Ba, 和gydF4y2BakgydF4y2Ba看看它们如何影响解决方案。你也可以改变质量的数量;代码从您提供的数据中获取质量的数量。gydF4y2Ba
参考gydF4y2Ba
[1] Lobo, Miguel Sousa, Lieven Vandenberghe, Stephen Boyd, Hervé Lebret。“二阶锥规划的应用”。gydF4y2Ba线性代数及其应用gydF4y2Ba284,没有。1-3(1998年11月):193-228。gydF4y2Bahttps://doi.org/10.1016/s0024-3795(98)10032-0gydF4y2Ba.gydF4y2Ba
另请参阅gydF4y2Ba
相关话题gydF4y2Ba
选择一个网站gydF4y2Ba
选择一个网站,在那里获得翻译的内容,并看到当地的活动和优惠。根据您的位置,我们建议您选择:gydF4y2Ba.gydF4y2Ba
选择gydF4y2Ba网站gydF4y2Ba您还可以从以下列表中选择一个网站:gydF4y2Ba
美洲gydF4y2Ba
- América拉丁gydF4y2Ba(Español)gydF4y2Ba
- 加拿大gydF4y2Ba(英语)gydF4y2Ba
- 美国gydF4y2Ba(英语)gydF4y2Ba
欧洲gydF4y2Ba
- 比利时gydF4y2Ba(英语)gydF4y2Ba
- 丹麦gydF4y2Ba(英语)gydF4y2Ba
- 德国gydF4y2Ba(德意志)gydF4y2Ba
- España.gydF4y2Ba(Español)gydF4y2Ba
- 芬兰gydF4y2Ba(英语)gydF4y2Ba
- 法国gydF4y2Ba(法语)gydF4y2Ba
- 爱尔兰gydF4y2Ba(英语)gydF4y2Ba
- 意大利gydF4y2Ba(意大利语)gydF4y2Ba
- 卢森堡gydF4y2Ba(英语)gydF4y2Ba
- 荷兰gydF4y2Ba(英语)gydF4y2Ba
- 挪威gydF4y2Ba(英语)gydF4y2Ba
- 奥地利gydF4y2Ba(德意志)gydF4y2Ba
- 葡萄牙gydF4y2Ba(英语)gydF4y2Ba
- 瑞典gydF4y2Ba(英语)gydF4y2Ba
- 瑞士gydF4y2Ba
- 英国gydF4y2Ba(英语)gydF4y2Ba
亚太地区gydF4y2Ba
- 澳大利亚gydF4y2Ba(英语)gydF4y2Ba
- 印度gydF4y2Ba(英语)gydF4y2Ba
- 新西兰gydF4y2Ba(英语)gydF4y2Ba
- 中国gydF4y2Ba
- 日本语gydF4y2Ba(日本语)gydF4y2Ba
- 한국gydF4y2Ba(한국어)gydF4y2Ba