主要内容
coneprog
二阶锥规划求解器
语法
描述
的coneprog函数是一个二阶锥规划求解器,它能找到指定问题的最小值
受约束
f,x,b,说真的,磅,UB.是载体,和一个和Aeq矩阵。为每一个我, 矩阵一个SC.(我),载体dSC.(我),bSC.(我)和标量γ(我)是在一个二阶锥约束中创建的secondordercone.
有关圆锥约束的详细信息,请参见二阶锥约束.
x= coneprog (f,socConstraints)socConstraints编码为
一个SC.(我)=
socConstraints.A(我)bSC.(我)=
socConstraints.b(我)dSC.(我)=
socconstraints.d(i)γ(我)=
socConstraints.gamma(我)
例子
输入参数
输出参数
更多关于
二阶锥约束
为什么是约束
叫做二阶锥约束?考虑三维空间中具有椭圆截面的圆锥x-y平面,直径成比例z坐标。的y坐标的比例是1 / 2x坐标的比例是1。定义圆锥体内部(点为[0,0,0])的不等式是
在coneprog语法,这个圆锥有以下参数。
A = diag([1 1/2 0]);b = (0, 0, 0);d = [0, 0, 1];γ= 0;
画出圆锥的边界。
(X, Y) = meshgrid (2:0.1:2);Z =√X。^ 2 + y ^ 2/4);冲浪(X, Y, Z)视图(8,2)包含“x”ylabel.“y”zlabel“z”
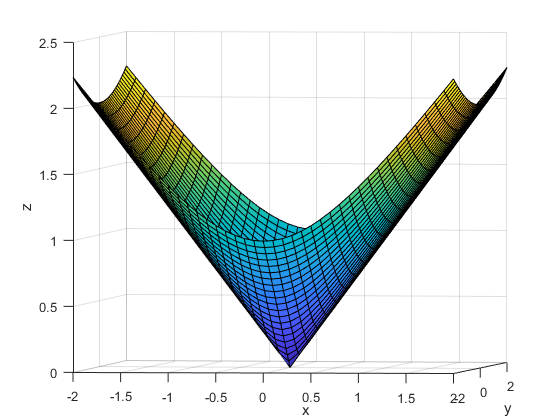
的b和伽玛参数移动圆锥。的一个和d争论旋转锥体并改变其形状。
算法
该算法使用内部点方法。有关详细信息,请参阅二阶锥规划算法.
选择功能
应用程序
的优化活动编辑器任务为coneprog.
兼容性的考虑
介绍了R2020b
你也可以从以下列表中选择一个网站: