分阶段。TimeDelayLCMVBeamformer
延时LCMV波束形成器
描述
的TimeDelayLCMVBeamformer对象实现了一种时滞线性约束最小方差波束形成器。
计算波束形成信号:
请注意
从R2016b开始,而不是使用一步方法来执行System对象™定义的操作,则可以使用参数调用该对象,就像调用函数一样。例如,Y = step(obj,x)而且Y = obj(x)请执行相同的操作。
建设
H =分阶段。TimeDelayLCMVBeamformer创建一个时滞线性约束最小方差波束形成器系统对象,H.该对象对接收到的信号执行延时LCMV波束形成。
H =分阶段。TimeDelayLCMVBeamformer (创建一个延时LCMV波束形成对象,的名字,价值)H,将每个指定的属性Name设置为指定的Value。您可以以任意顺序指定额外的名-值对参数,如(Name1,Value1、……以,家).
属性
|
传感器阵列的手柄 将传感器阵列指定为句柄。对象中的数组对象 默认值: |
||||
|
信号传播速度 指定信号的传播速度(以米每秒为单位)为正标量。您可以将此属性指定为单精度或双精度。 默认值:光速 |
||||
|
信号采样率 指定信号采样速率(以赫兹为单位)为正标量。此属性可以指定为单精度或双精度。 默认值: |
||||
|
FIR滤波器长度 将数组中每个传感器元素后面的FIR滤波器的长度指定为正整数。此属性可以指定为单精度或双精度。 默认值: |
||||
|
约束矩阵 指定用于时滞LCMV波束形成器的约束矩阵为米——- - - - - -K矩阵。矩阵的每一列都是一个约束和米是波束形成器的自由度数。对于时滞LCMV波束形成器,自由度的数量是阵列元素的数量和滤波器长度的乘积 默认值: |
||||
|
期望响应向量 指定用于延时LCMV波束形成器的期望响应作为长度的列向量K,在那里K约束的数量是多少 默认值: |
||||
|
对角加载系数 将对角线加载因子指定为正标量。对角加载是一种用于实现鲁棒波束形成性能的技术,特别是在样本支持很小的情况下。金宝app此属性是可调的。此属性可以指定为单精度或双精度。 默认值: |
||||
|
添加输入以指定训练数据 若要指定额外的训练数据,请将此属性设置为 默认值: |
||||
|
波束形成方向源 指定波束形成方向是否来自
默认值: |
||||
|
波束形成方向 指定波束形成器的波束形成方向为长度为2的列向量。格式为 默认值: |
||||
|
输出波束形成权值 若要获得波束形成器中使用的权重,请将此属性设置为 默认值: |
例子
延时LCMV波束形成器
将时延LCMV波束形成器应用于11元声学ULA阵列。这些元素是全向麦克风。信号的入射角是方位角-50度,仰角30度。入射信号是500赫兹带宽的调频啁啾。传播速度是典型的声音在空气中的传播速度,340米/秒。
模拟信号并添加噪声。
nElem = 11;麦克风=阶段性。OmnidirectionalMicrophoneElement (...“FrequencyRange”[20000]);阵列=相控阵。齿龈(“元素”麦克风,“NumElements”nElem,“ElementSpacing”, 0.04);Fs = 8000;T = 0:1/fs:0.3;X = chirp(t,0, 1500);C = 340;收集器=阶段性。WidebandCollector (“传感器”数组,...“PropagationSpeed”c“SampleRate”fs,...“ModulatedInput”、假);incidentAngle = [-50;30];x = collector(x.',incidentAngle);噪声= 0.2*randn(大小(x));Rx = x +噪声;
创建并应用延时LCMV波束形成器。指定过滤器长度为5。
filterLength = 5;constraintMatrix = kron(eye(filterLength),ones(nElem,1));desiredResponseVector = eye(filterLength,1);波束形成器=相控。TimeDelayLCMVBeamformer (“SensorArray”数组,...“PropagationSpeed”c“SampleRate”fs,“FilterLength”filterLength,...“方向”incidentAngle,“约束”constraintMatrix,...“DesiredResponse”, desiredResponseVector);Y =波束形成器(rx);
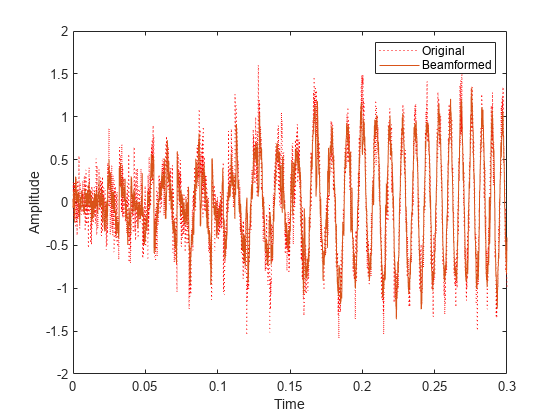
比较波束形成器的输出和中间传感器的输入。
情节(t, rx (:, 6),“:”、t、y)包含(“时间”) ylabel (“振幅”)传说(“原始”,“Beamformed”)
算法
参考文献
[1] Frost, O.“线性约束自适应阵列处理算法”,IEEE论文集.1972年8月,第60卷第8期,第926-935页。
[2] Van Trees, H。优化阵列处理.纽约:Wiley-Interscience, 2002。
扩展功能
另请参阅
分阶段。FrostBeamformer|分阶段。PhaseShiftBeamformer|分阶段。SubbandPhaseShiftBeamformer|分阶段。TimeDelayBeamformer|phitheta2azel|uv2azel
主题
您也可以从以下列表中选择一个网站:
