主要内容
感应电机直接转矩控制(单相)
单相感应电机直接转矩控制
- 库:
Simscape /电气/控制/感应机控制
描述
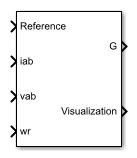
的感应电机直接转矩控制(单相)块体实现了单相感应电机直接转矩控制结构。
方程
这张图显示了单相电机的直接转矩控制架构
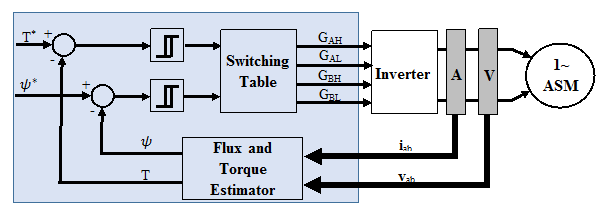
转矩和磁链估计是基于机器电压方程。采用反向欧拉离散法的离散时间电压方程为:
地点:
R作为和R废话分别为主绕组电阻和辅助绕组电阻。
我一个和我b分别为主绕组电流和辅助绕组电流。
v一个和vb分别为主绕组电压和辅助绕组电压。
ψ一个和ψb分别为主绕组和辅助绕组焊剂。
扭矩和助焊剂可从:
地点:
p是极点对的数目。一个是主要绕组转弯比的辅助。
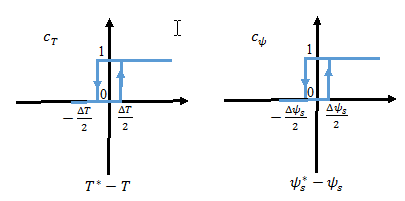
使用简单的迟滞比较器检测磁链和转矩误差的状态。下图说明了迟滞比较器和开关扇区。

该表显示了最佳开关表(逆变器高侧)。
| cψ,cT,S(θ) | 年代0 | 年代1 | 年代2 | 年代3. | |
|---|---|---|---|---|---|
cψ= 1 |
cT= 1 |
1,0. | 1,1. | 0,1. | 0,0. |
cT= 0. |
1,1. | 0,1. | 0,0. | 1,0. | |
cψ= 0. |
cT= 1 |
0,0. | 1,0. | 1,1. | 0,1. |
cT= 0. |
0,1. | 0,0. | 1,0. | 1,1. | |
转矩参考可以作为输入,或者,在速度控制的情况下,由PI速度控制器内部生成。
在内部使用磁通引用:
在那里,
ω.r是Rad / s中的转子角机械速度。
fn是额定频率。
ψn是额定通量。
限制
在该块中不考虑电源逆变器死亡时间。对于硬件实现,请在外部添加死区时间。
港口
输入
输出
参数
参考
Takahashi, I.和T. Noguchi。一种新型感应电机快速、高效控制策略IEEE工业应用汇刊.卷。IA-22,第5号,第1986号,第820页。820 - 827。
扩展功能
另请参阅
块
主题
介绍了R2018b
您还可以从以下列表中选择一个网站: