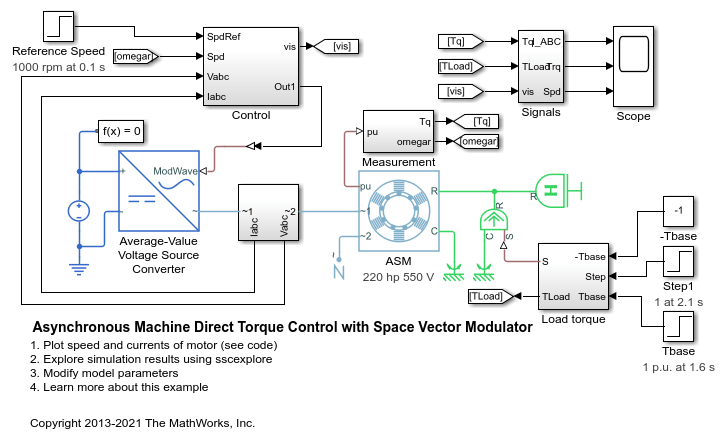
空间矢量调制器的感应电机直接转矩控制
感应电机DTC结构与支持向量机
- 图书馆:
Simscape /电气/控制/感应电机控制

描述
这个空间矢量调制器的感应电机直接转矩控制采用空间矢量调制器(SVM)实现感应电机直接转矩控制结构(DTC)。使用此块为控制感应电机的逆变器生成栅极脉冲。此图显示了该块的体系结构。

在图中:
你提供参考扭矩,T*通量,ψ*.
磁通和转矩估计器估计实际转矩,T通量,ψ根据测得的相电流,我abc,电压,vabc.
两个PI控制器确定基准D和Q电压,vD和vQ,分别来自磁通和转矩误差。
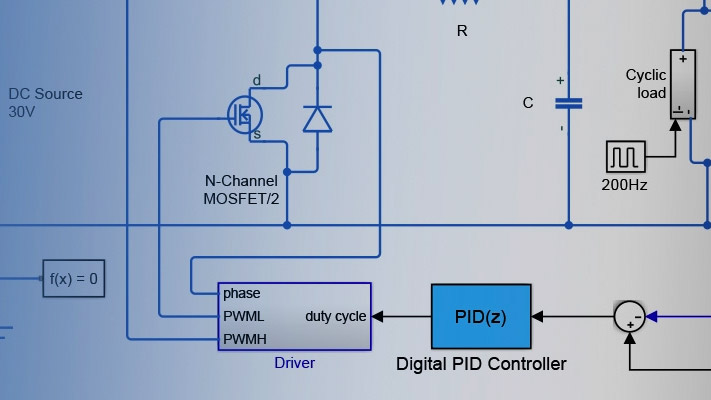
支持向量机产生闸门脉冲,Gij,用于控制驱动感应电机的逆变器。下标我对应相位(A.,B或C).下标J对应于高,,H或低L信号
磁链和扭矩估计器
为了估计转矩和磁链,块在静止状态下离散机器电压方程ɑβ使用后向欧拉法建立的坐标系。定子磁通的离散时间方程ɑβ框架是:
哪里:
vɑ和vβ是ɑ- - -β分别设在电压。
我ɑ和我β是ɑ- - -β-轴电流,分别。
Ψɑ和Ψβ是ɑ- - -β分别为-轴定子磁通。
Rs是定子电阻。
该块计算转矩和定子总磁链如下:
哪里:
P是极对数。
Ψs是定子总磁通量。
空间矢量调制
支持向量机将所需的电压转换为门脉冲,您使用它来控制逆变器。这张图显示了三相逆变器可能的开关状态。

六边形表示空间矢量图。这六个顶点中的每一个都代表一种可能的切换状态(G啊G波黑G中国)三相逆变器的设计。每个低栅极将相反的状态作为其对应的高栅极。逆变器图显示了当前状态。
空间矢量图中的旋转矢量对应于复参考电压矢量,其以机器的期望电气频率旋转。实际上,开关频率比这个电频率快得多。因此,逆变器在包围其电流区域的两种状态之间持续切换Ri,对应的是零状态(0, 0, 0),以产生所需的电压。
要了解此方法的实现,请参阅PWM发生器(三相,两电平)块
港口
输入
输出
参数
参考文献
Buja, g.s.和M. P Kazmierkowski。“PWM逆变器馈电交流电机的直接转矩控制研究”。IEEE工业电子学汇刊51岁的没有。4、(2004):744 - 757。
扩展能力
你也可以从以下列表中选择一个网站: