主要内容
感应电机磁场定向控制(单相)
每单位离散时单相管机场导向控制
- 库:
Simscape /电气/控制/感应机控制
描述
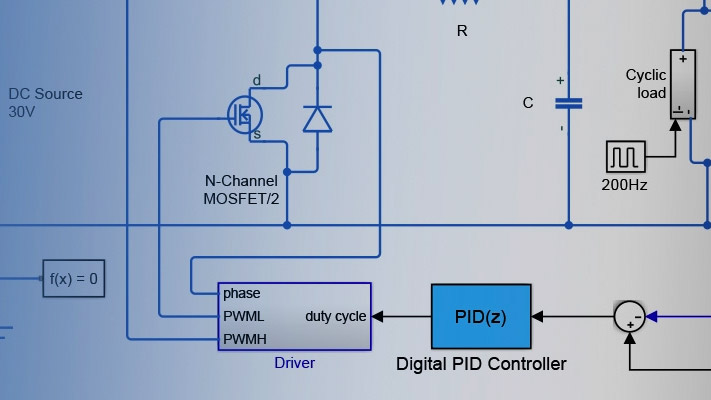
的感应电机磁场定向控制(单相)Block实现了单相感应电机的磁场定向控制结构。
方程
用于单相管机的现场导向控制架构是:
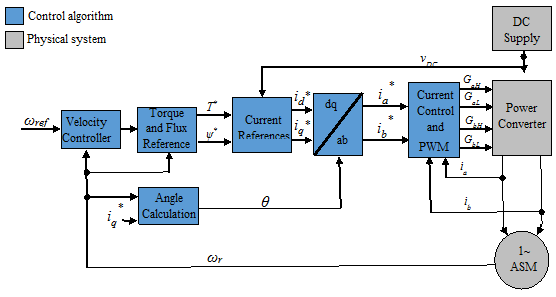
您可以提供扭矩参考作为输入,或者,在速度控制的情况下,使用PI速度控制器内部生成参考。由PI速度控制器推导出的转矩参考为:
在哪里ω.r是RAD / s中的转子角机械速度。
该块产生磁通引用作为
地点:
p是极点对的数目。
fn是额定频率。
ψn为额定通量。
目前的参考资料来自机器参数:
地点:
l多发性硬化症是主要的绕组互感。
l拉是主绕组转子的漏电电感。
一个是辅助到主绕组匝数比。
角度的计算方法为:
到静止坐标系的转换是通过以下方法完成的:
限制
控制结构采用单采样率实现。
港口
输入
输出
参数
参考
[1] COREA,M.B.R,Jacobina,C. B.,Lima,A.M. N.,Da Silva,E. R.C“对单相电动机驱动的电磁面对控制”。PESC 98记录。第29届IEEE电力电子专家会议.卷。2,1998,第990 - 996。
扩展功能
另请参阅
块
主题
介绍了R2018b
您还可以从以下列表中选择一个网站: