主要内容
逆动力学
适用于给定运动所需的联合扭矩
- 图书馆:
机器人系统工具箱/操纵器算法
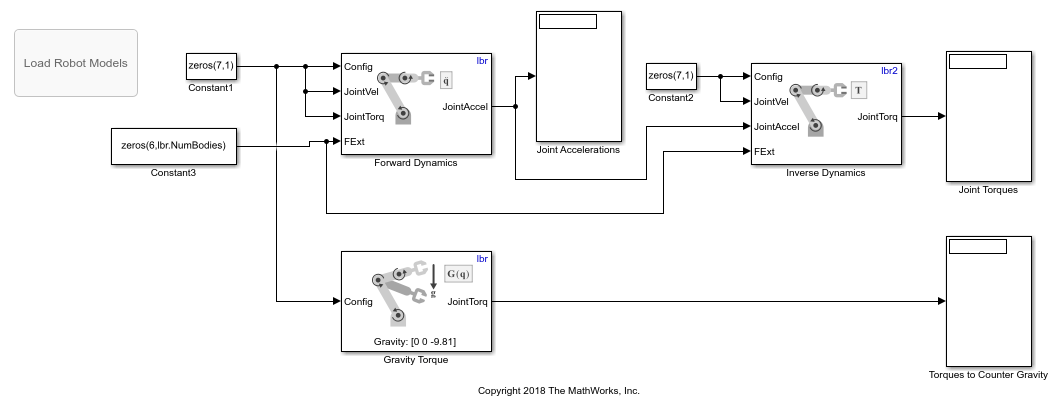
描述
这逆动力学块返回机器人维护指定机器人状态所需的联合扭矩。要获得所需的联合扭矩,请指定机器人配置(联合位置),联合速度,关节加速度和外力。
港口
输入
输出
参数

扩展能力
也可以看看
块
课堂
职能
在R2018A介绍
您还可以从以下列表中选择一个网站:
适用于给定运动所需的联合扭矩
机器人系统工具箱/操纵器算法

这逆动力学块返回机器人维护指定机器人状态所需的联合扭矩。要获得所需的联合扭矩,请指定机器人配置(联合位置),联合速度,关节加速度和外力。
您还可以从以下列表中选择一个网站: