刚体树机器人模型
刚体树模型是机器人结构的一种表示形式。你可以用它来表示机器人,如操作手或其他运动学树。使用rigidBodyTree对象来创建这些模型。
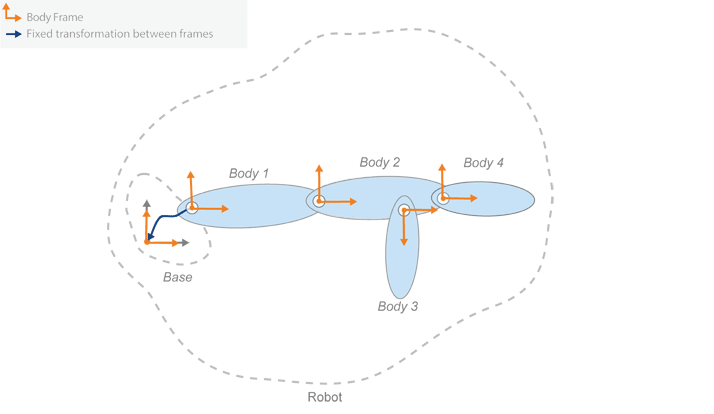
刚体树由刚体(rigidBody),通过关节连接(rigidBodyJoint).每个刚体都有一个关节,这个关节定义了刚体相对于树中的父刚体的运动方式。通过在每个关节上设置固定的转换,指定从一个物体到下一个物体的转换(setFixedTransform).
您可以从刚体树模型中添加、替换或删除刚体。你也可以为特定的身体更换关节。的rigidBodyTree对象维护关系并更新rigidBody对象属性以反映此关系。您还可以使用getTransform.
刚体树组件
基地
每个刚体树都有一个基座。基座定义了世界坐标系,是刚体的第一个附着点。base不能被修改,除了的名字财产。可以通过修改BaseName刚体树的性质。
刚体
刚体是刚体树模型的基本构造块,用rigidBody.刚体,有时称为连杆,代表不变形的实体。单个刚体上任意两点之间的距离保持不变。

当添加到具有多个刚体的刚体树中时,刚体有与它们相关联的父体或子体(父或孩子们属性)。母体是刚体附着的物体,它可以是机器人的基座。这些孩子是所有附着在这个刚体树底部下游的物体。
每个刚体都有一个与之相关联的坐标系,并包含一个rigidBodyJoint对象。
联合
每个刚体都有一个关节,这个关节定义了刚体相对于母体的运动。它是连接机器人模型中两个刚体的连接点。若要表示具有多个关节或不同运动轴的单个物理物体,请使用multiplerigidBody对象。
的rigidBodyJoint物体支持固定关金宝app节、转动关节和移动关节。

这些关节允许以下运动,取决于它们的类型:
“固定”——没有运动。体与它的父体是刚性连接的。“转动”-只有旋转运动。物体围绕这个关节旋转相对于它的父关节。位置限制以弧度定义了围绕运动轴的最小和最大角度位置。“移动”-只是平移运动。物体相对于母体沿运动轴作线性运动。
每个关节都有一个运动轴JointAxis财产。关节轴是一个三维单位矢量,它定义了旋转轴(转动关节)或平动轴(移动关节)。的HomePosition属性定义该特定关节的主位置,即位置限制内的一个点。使用homeConfiguration返回机器人的主配置,它是模型中所有关节的主位置的集合。
关节还具有定义父体坐标系和子体坐标系之间固定转换的属性。属性只能使用setFixedTransform方法。根据您输入转换参数的方法JointToParentTransform或ChildToJointTransform属性使用此方法设置。另一个属性设置为单位矩阵。下面的图片描述了每个属性的含义。
![]()
的
JointToParentTransform定义子主体的关节与父主体框架的关系。当JointToParentTransform为单位矩阵,父体与关节框架重合。的
ChildToJointTransform定义子体的关节与子体框架的关系。当ChildToJointTransform为单位矩阵,子体与关节架重合。
请注意
实际的关节位置不是这个的一部分联合对象。机器人模型是无状态的。在父关节框架和子关节框架之间有一个中间转换,它定义了关节沿运动轴的位置。这个转换在机器人配置中定义。看到机器人的配置.
机器人的配置
在完全装配好机器人并定义不同身体之间的转换之后,就可以创建机器人构型了。构型通过关节名称定义机器人的所有关节位置。
使用homeConfiguration得到HomePosition属性,并创建主配置。
机器人的构型以结构数组的形式给出。
配置= homeConfiguration(机器人)
config = 1×6 struct array with fields: JointName
配置(1)
ans = struct with fields: JointName: 'jnt1' JointPosition: 0
你也可以生成一个符合所有关节极限的随机构型randomConfiguration.
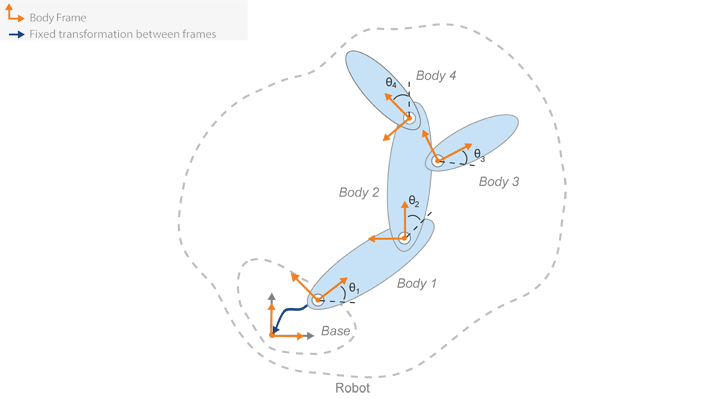
使用机器人配置,当你想在图形中绘制一个机器人使用显示.此外,您还可以使用特定的配置来获得两个身体框架之间的转换getTransform.
![]()
要获得具有指定末端执行器姿态的机器人构型,使用inverseKinematics.该算法求解所需的关节角度,以实现特定刚体的特定姿态。
另请参阅
inverseKinematics|rigidBodyTree
相关的话题
你也可以从以下列表中选择一个网站: