飞机模型环形整形控制设计
来看看loopsyn命令在实践中运作,解决稳健性和性能权衡,再次考虑从Safonov,Thub和Hartmann纸上采取的NASA Himat飞机模型[8]。以25000英尺和0.9马赫修剪过的HIMAT飞机的纵向动力学不稳定,并具有两个右半平面垂饰模式。线性模型具有状态空间实现
Ag = [-2.2567e-02 -3.6617e+01 -1.8897e+01 -3.2090e+01 3.2509e+00 -7.6257e-01;9.2572e-05 -1.8997e+00;1.2338e-02 1.1720e+01 -2.6316e+00 8.7582e-04 - 3.164e +01 2.2396e+01;00 1.0000e+00 0000;0000 -3.0000e+01 0;0000 000 -3.0000e+01];Bg = [0 0;0 0;0 0;0 0; 30 0; 0 30]; cg = [0 1 0 0 0 0; 0 0 0 1 0 0]; dg = [0 0; 0 0]; G = ss(ag,bg,cg,dg);
控制变量是升降副翼和鸭翼执行器(δ
飞机配置和垂直平面几何

该模型良好的频率低于100 rad / s,在真正的飞机和该频率范围内的模型之间的变化小于30%。但是如上所述[8],它不能可靠地捕获非常高频率的行为,因为它是通过将飞机作为刚体处理而得出的并且忽略在100至300 rad / s之间发生的轻微阻尼的机身弯曲模式。这些未拼接的弯曲模式可能导致模型的频率响应和频率ω> 100 rad / s的实际飞机之间的20dB偏差(即1000%)。其他效果,如控制致动器时间延迟和燃料晃动也有助于在甚至更高的频率下模拟不准确性,但是主导的未暗模式是机身弯曲模式。您可以将这些未铭出的弯曲模式视为大小20 dB的乘法不确定度,并使用距离的循环在频率ω> 100 rad / s的频率ω> 100 rad / s中设计控制器使用offopsyn来设计控制器。
设计指标
奇异值设计规格是
鲁棒性规格。:-20 db / deadade滚降斜率和-20 dB环路增益100 rad / s
性能规格。:尽可能最小化灵敏度函数。
这两种规格都可以适应作为所需的环形状
GD.(
马铃薯浮标设计的命令
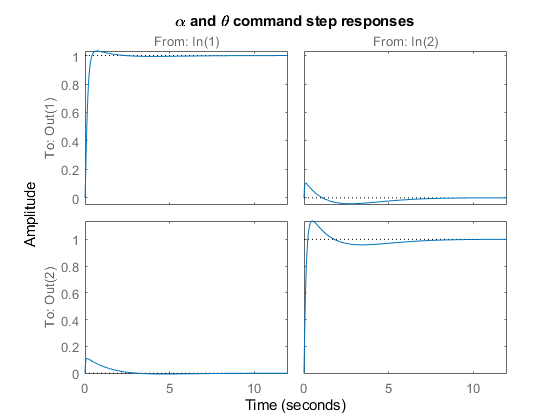
s = zpk('); %laplace变量sgd = 8 / s; %期望的循环形状%计算最佳环形整形控制器k[K CL GAM] = loopsyn (G, Gd); %计算环L,灵敏度S和互补灵敏度T:l = g * k;i =眼睛(尺寸(l));s =反馈(i,l); % S =发票(I + L);t = i-s; %绘制结果:%步骤响应图步骤(t);标题( '\ alpha和\ theta命令步骤响应');
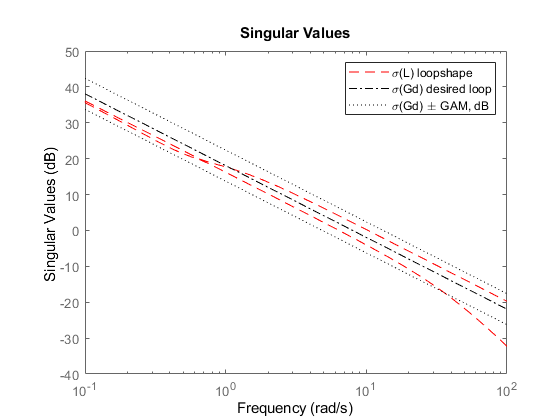
%频率响应图图;σ(L,'r--',gd, 'k-。',gd / gam, 'k:'Gd *联欢, 'k:',{。1,100})传奇( “\σ(L) loopshape”那 ......'\ sigma(gd)所需的循环'那 ......'\sigma(Gd) \pm GAM, dB');
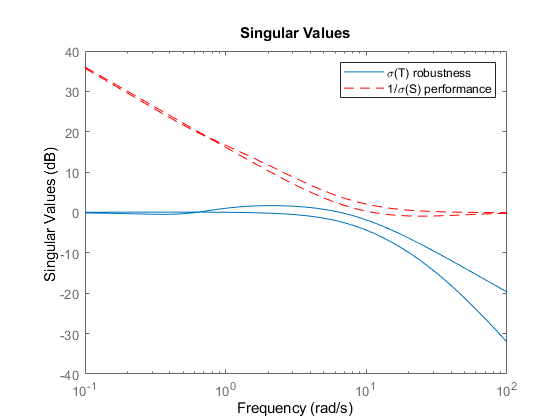
图;sigma(t,i + l,'r--',{。1,100})传奇( '\ sigma(t)鲁棒性'那 1 / \σ(S)性能的)
数字±GAM, dB(即20log10(GAM))告诉您的精度与您的loopsyn控制设计与目标所需循环匹配:
也可以看看
相关的话题
你也可以从以下列表中选择一个网站: