wcdiskmargin
不确定反馈环的最坏情况基于盘的稳定裕度
语法
描述
最坏情况磁盘裕度是在指定的不确定范围内发生的最小磁盘裕度。它也是不确定性范围内的最小保证保证金。wcdiskmargin估计最坏情况的磁盘裕度和相应的最坏情况增益和相位裕度的循环-一次和多循环变化。该函数还返回最坏情况的扰动,即产生最弱边际的不确定元素的组合。
[估计不确定负反馈环的最坏情况下每次循环的基于磁盘的稳定裕度wcDM,wcu= wcdiskmargin(l“输出”)反馈(L,眼(N)),在那里N输入和输出的数量在吗l.
而diskmargin计算标称模型的稳定裕度,wcdiskmargin计算最坏情况(最小)的磁盘边缘在建模的不确定性l.基于盘的裕度分析提供了比经典增益和相位裕度更强的鲁棒稳定性保证。有关磁盘边距的一般信息,请参见利用盘边距进行稳定性分析.
___= wcdiskmargin (___,指定附加的倾斜参数,使建模增益和相位变化偏向增益增加(正)σ)σ)或增益减少(负的σ).您可以使用此参数来测试稳定边际对增益增加与减少的相对敏感性。您可以将此参数用于前面的任何语法。
[___,返回一个结构,其中包含关于最坏情况边际和产生边际的扰动的附加信息。您可以将此输出参数与前面的任何语法一起使用。信息= wcdiskmargin(___)
例子
不确定MIMO反馈回路的最坏情况磁盘裕度
使用wcdiskmargin计算最坏情况下一次循环和多循环磁盘裕度。这个例子说明,一次一个环的裕度可以对MIMO反馈环的真正鲁棒性给出过于乐观的评估。单个环的边缘可能对其他环内的小扰动敏感。
考虑下图中的闭环系统。

P双输入、双输出的二阶设备和C是一个2x2的静态增益。构造P在状态空间形式中,假设它有一个不确定参数和一些动态不确定性。计算工厂输出的最坏情况的磁盘裕度(要计算工厂输入的裕度,使用L = C*Pu).
P = ureal(“p”10“比例”10);A = [-0.2 p;-p -0.2];B =眼睛(2);C = [1 p;-p 1];D = 0 (2,2);P = ss(a,b,c,0);DEL = ultidyn(“▽”(2 - 2),“约束”, 0.1);Pu = P*(眼(2)+DEL);C = [1 -2;0 1];L = Pu*C;[wcDM,wcu] = wcdiskmargin(L,“输出”);
检查在结构数组中返回的最坏情况下每次循环的磁盘边距wcDM.该结构数组中的每个条目都包含相应通道的最坏情况稳定裕度。
wcDM (1)
ans =带字段的结构:GainMargin: [0.5298 1.8875] PhaseMargin: [-34.1696 34.1696] DiskMargin: 0.6147 LowerBound: 0.6147 UpperBound: 0.6160 CriticalFrequency: 0最差扰动:[2x2 ss]
结果是wcDM (1)对指定的不确定范围给出保证的稳定裕度。只要第一个信道的开环增益在0.53到1.88之间变化,闭环对所有信道都保持稳定德尔(p)指定范围内的值。同样,只要相位变化绝对值不超过34°,闭环就保持稳定。
同样的,wcDM (2)结果表明,在第二反馈通道中,增益可以在0.52 ~ 1.93之间的任何因子中变化,或者相位可以在35°之间变化,并且在这种变化下系统保持稳定德尔(p)不确定性。
wcDM (2)
ans =带字段的结构:GainMargin: [0.5167 1.9352] PhaseMargin: [-35.3450 35.3450] DiskMargin: 0.6372 LowerBound: 0.6372 UpperBound: 0.6386 CriticalFrequency: -2.2950e-08最差扰动:[2x2 ss]
下界返回wcdiskmargin是理论上保证最坏情况磁盘裕度的最小值。上界对应于特定不确定性范围内接近下界预测的实际扰动。输出wcu包含每个反馈通道的扰动值。例如,wcu (2)最糟糕的组合是什么德尔(α)对于第二个通道,与磁盘边缘的这种最差组合是接近的wcDM (2).特别是,DM(2)。UpperBound而且wcDM(1)。UpperBound匹配。
wcL = usubs(L,wcu(2));DM = diskmargin(wcL);DM (2)
ans =带字段的结构:GainMargin: [0.5159 1.9382] PhaseMargin: [-35.4184 35.4184] DiskMargin: 0.6386 LowerBound: 0.6386 UpperBound: 0.6386 Frequency: 2.2950e-08最差扰动:[2x2 ss]
实际上,增益和相位变化同时影响两个信道。要估计关于这些独立和并发变化的稳定裕度,请检查最坏情况下的多回路磁盘裕度。
wcMM = wcdiskmargin(L,“再分配”)
wcMM =带字段的结构:GainMargin: [0.8836 1.1317] PhaseMargin: [-7.0730 7.0730] DiskMargin: 0.1236 LowerBound: 0.1236 UpperBound: 0.1239 CriticalFrequency: 0最差扰动:[2x2 ss]
多循环边缘比一次考虑一个循环时弱得多。这是因为当两个通道都受到变化的影响时,需要较小的增益(或相位)变化来破坏反馈环路。
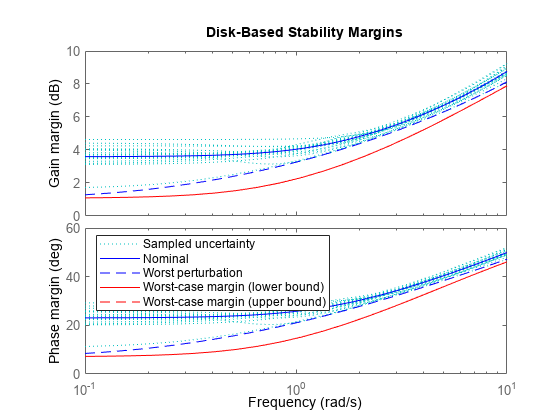
你可以想象不确定性是如何影响边际的wcdiskmarginplot.的标称值和最坏情况值的频率函数绘制(基于磁盘的)增益和相位裕度德尔(α)以及这种不确定性的20个随机样本。图表显示,不确定性削弱了DC附近的边际。
wcdiskmarginplot (L, {1 e 1, 1 e1})传说(“位置”,“西北”)
最后,计算在装置输入和装置输出时增益(或相位)同时变化的多回路余量。当你允许增益(或相位)在更多的地方发生变化时,反馈回路变得更容易不稳定,因此边际变得更小。因此,多回路I/O裕度提供了面对增益或相位变化和鲁棒稳定性的最全面和最保守的评估德尔(α)不确定性。
wcMMIO = wcdiskmargin(Pu,C)
wcMMIO =带字段的结构:GainMargin: [0.9363 1.0680] PhaseMargin: [-3.7681 3.7681] DiskMargin: 0.0658 LowerBound: 0.0658 UpperBound: 0.0659 CriticalFrequency: 1.0000e-04最糟的扰动:[1x1 struct]
输入参数
l- - - - - -不确定开环响应
不确定模型|模型组
不确定开环响应,指定为不确定模型,如号航空母舰或ufrd模型。l可以是SISO或MIMO,只要它有相同数量的输入和输出。wcdiskmargin计算负反馈闭环系统最坏情况下基于盘的稳定裕度反馈(L,眼(N)).
计算正反馈系统最坏情况下的磁盘裕度反馈(L,眼睛(N), + 1),使用wcdiskmargin (- l).
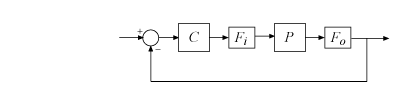
当你有一个控制器P还有一株植物C,您可以计算在设备输入或输出时的增益(或相位)变化的最坏情况的磁盘边缘,如下图所示。
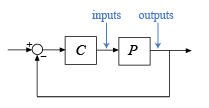
若要计算工厂输出的边际,请设置
L = p * c.若要计算工厂投入的边际,请设置
L = c * p.要考虑植物输入和植物输出的变化,请使用以下语法
[wcMMIO,wcu] = wcdiskmargin(P,C)代替。
l可以是连续时间或离散时间。如果l是广义状态空间模型(一族),那么wcdiskmargin中的可调控制设计块的当前值l.
如果l是频率响应数据模型(如ufrd),然后wcdiskmargin计算模型中表示的每个频率的边缘。该函数返回磁盘边距最小的频率上的最差情况边距。
如果l是一个模型数组吗wcdiskmargin计算数组中每个模型的边距。
P- - - - - -植物
不确定模型
植物,指定为一个不确定的模型,如号航空母舰或ufrd模型。P可以是SISO或MIMO,只要P C *有相同数量的输入和输出。wcdiskmargin计算负反馈闭环系统最坏情况下的磁盘裕度。若要计算具有正反馈的系统磁盘边缘,请使用wcdiskmargin (P - c).
P可以是连续时间或离散时间。如果P是广义状态空间模型(一族),那么wcdiskmargin中的可调控制设计块的当前值P.
如果P是频率响应数据模型(如的朋友),然后wcdiskmargin计算模型中表示的每个频率的边缘。该函数返回磁盘边距最小的频率上的最差情况边距。
C- - - - - -控制器
动态系统模型
控制器,指定为动态系统模型。C可以是SISO或MIMO,只要P C *有相同数量的输入和输出。wcdiskmargin计算负反馈闭环系统基于盘的稳定裕度。若要计算具有正反馈的系统磁盘边缘,请使用wcdiskmargin (- c、P).
C可以是连续时间或离散时间。如果C是广义状态空间模型(一族),那么wcdiskmargin中的可调控制设计块的当前值C.
如果C是频率响应数据模型(如的朋友),然后wcdiskmargin计算模型中表示的每个频率的边缘。该函数返回磁盘边距最小的频率上的最差情况边距。
σ- - - - - -斜
0(默认)|真正的标量
用于计算稳定裕度的不确定区域的倾斜,指定为实标量值。该参数使用于建模增益和相位变化的不确定性偏向增益增加或增益减少。
默认的
σ= 0使用一个范围内增益变化的平衡模型[gmin, gmax],Gmin = 1/gmax.积极的
σ使用增益增加大于减少的模型(Gmin > 1/gmax).负
σ使用增益降低大于增加的模型(Gmin < 1/gmax).
使用默认值σ= 0以获得增益和相位裕度的无偏估计。您可以通过比较正负边际来测试增益增加和减少的相对敏感性σ值。欲了解更多关于如何选择的详细信息σ影响保证金计算,请参见利用盘边距进行稳定性分析.
选择- - - - - -保证金计算选项
wcOptions对象
用于最坏情况计算的选项,指定为创建的对象wcOptions.可用的选项包括设置,使您:
提取频率相关的最差情况边缘。
检查最坏情况边缘对每个不确定元素的敏感性。
通过为基础期权设置某些选项来改善最坏情况保证金计算结果
mussv计算。
有关所有可用选项的详细信息,请参见wcOptions.
例子:wcOptions(“敏感性”,“对”,“MussvOptions”,“m3”)
输出参数
wcDM-每个反馈通道的最差铸造磁盘边缘
|结构数组
在所有其他循环关闭的情况下,每个反馈通道的最差情况磁盘边距,返回为SISO反馈循环的结构或N-by-1结构数组用于MIMO循环N反馈渠道。的领域wcDM(我)是:
| 场 | 价值 |
|---|---|
GainMargin |
基于最小保证盘的增益边际对应反馈通道,以矢量的形式返回[gmin, gmax].这些值意味着,只要开环的增益我信道的变化不小于一个因子gmin不超过gmax的不确定度范围内,闭环保持稳定l.如果开环增益可以改变符号而不损失稳定性,gmin如果负数足够大,可以小于零吗σ.如果闭环系统对于某些不确定性值的组合变得不稳定,那么wcDM(我)。GainMargin = [1 1]. |
PhaseMargin |
基于最小保证盘相裕度的相应反馈通道,以矢量的形式返回(下午、晚上)在度。如果闭环系统对于某些不确定性值的组合变得不稳定,那么wcDM(我)。PhaseMargin = [0 0]. |
DiskMargin |
最小保证磁盘裕度(参见利用盘边距进行稳定性分析用于磁盘边缘的定义和解释)。如果闭环系统对于某些不确定元素值的组合不稳定,则wcDM(我)。DiskMargin = 0. |
下界 |
最坏情况磁盘边缘的下界。该值与DiskMargin. |
UpperBound |
最坏情况磁盘边缘的上限。这个值是由最坏扰动得到的圆盘边缘wcdiskmargin,返回为wcu(我).实际的最坏情况磁盘裕度不会比这个值更好。 |
CriticalFrequency |
频率在该圆盘边缘处为最坏扰动wcu(我)是最弱的,作为频率的函数。这个值的单位是rad/TimeUnit,在那里TimeUnit是TimeUnit的属性l. |
WorstPerturbation |
最小增益和相位变化,驱动反馈环不稳定的最坏情况下的不确定元素组合。扰动作为状态空间返回(
这个状态空间模型是这种形式的对角摄动 有关口译的更多信息 这个字段不同于 |
当L = p * c是由控制器和设备组成的系统的开环响应,每个通道中都有单元负反馈,wcDM包含工厂产量变化的稳定裕度。要计算工厂投入变化的稳定裕度,请使用L = c * p.为计算装置输入和输出同时独立变化的稳定裕度,使用wcMMIO = wcdiskmargin(P,C).
当l是一个模型数组,wcDM是否有与数组尺寸相对应的附加尺寸l.例如,如果l是一个1 × 3数组的双输入,双输出模型,那么wcDM是2 × 3结构数组。wcDM (j, k)包含j的页边距thk的反馈通道th在数组中建模。
wcu-产生最弱边缘的扰动
结构数组|结构
产生最弱边缘的不确定元素的扰动,返回为:
尺寸的结构数组N-by-1表示一次循环边距,其中N反馈渠道的数量是多少
多循环边距的标量结构
下界返回wcdiskmargin是理论上保证最坏情况磁盘裕度的最小值。上界对应于特定不确定性范围内接近下界预测的实际扰动。wcu包含该扰动的值。例如,如果输入系统包含不确定元素米而且δ,然后wcu。米而且wcu.delta包含最坏的扰动wcdiskmargin.可能存在更差的扰动,但没有扰动能产生比由返回的下界更差的边缘wcdiskmargin.
使用usubs将这些值替换为输入系统中的不确定元素,得到具有最坏情况磁盘裕度的动态系统。
wcMM-最坏情况下多环磁盘边缘
结构
最坏情况下多循环磁盘边缘,作为结构返回。增益(或相位)裕度量化了系统在保持稳定的同时,在所有反馈通道中可以容忍多少增益变化(或相位变化)。因此,wcMM无论系统中反馈通道的数量如何,都是单一结构。(对于SISO系统,wcMM=wcDM)。的领域wcMM是:
| 场 | 价值 |
|---|---|
GainMargin |
最小保证基于多循环盘的增益余量,以矢量形式返回[gmin, gmax].这些值意味着只要所有循环通道中的增益变化不小于gmin不超过gmax的不确定度范围内,闭环保持稳定l.如果闭环系统对于某些不确定性值的组合变得不稳定,那么wcMM。GainMargin = [1 1]. |
PhaseMargin |
最小保证多回路盘面相位裕度,以矢量形式返回(下午、晚上)在度。如果闭环系统对于某些不确定性值的组合变得不稳定,那么wcMM。PhaseMargin = [0 0]. |
DiskMargin |
最小保证磁盘裕度(参见利用盘边距进行稳定性分析用于磁盘边缘的定义和解释)。如果闭环系统对于某些不确定元素值的组合不稳定,则wcMM。DiskMargin = 0. |
下界 |
最坏情况磁盘边缘的下界。该值与DiskMargin. |
UpperBound |
最坏情况磁盘边缘的上限。这个值是由最坏扰动得到的圆盘边缘wcdiskmargin,返回为wcu.实际的最坏情况多循环磁盘裕度不会比这个值更好。 |
CriticalFrequency |
频率在该圆盘边缘处为最坏扰动wcu是最弱的,作为频率的函数。这个值的单位是rad/TimeUnit,在那里TimeUnit是TimeUnit的属性l. |
WorstPerturbation |
最小增益和相位变化,驱动反馈环不稳定的最坏情况下的不确定元素组合。扰动作为状态空间返回(
这个状态空间模型是这种形式的对角摄动 有关口译的更多信息 这个字段不同于 |
当L = p * c是由控制器和设备组成的系统的开环响应,每个通道中都有单元负反馈,wcMM包含工厂产量变化的稳定裕度。要计算工厂投入变化的稳定裕度,请使用L = c * p.为计算装置输入和输出同时独立变化的稳定裕度,使用wcMMIO = wcdiskmargin(P,C).
当l是一个模型数组,wcMM结构数组中每个模型都有一个条目吗l.
wcMMIO-所有输入和输出通道中独立变化的最差情况磁盘裕度
结构
在工厂的所有输入和输出通道中独立变化的最坏情况磁盘边缘P,作为具有相同字段的结构返回wcMM.
对于同时应用于输入和输出的变量WorstPerturbation字段本身就是一个包含字段的结构输入而且输出.每个字段都包含一个状态空间模型,用于Fi(s) = wcmmio . worst微扰而且Fo(s) = wcmmio . worst微扰时,下图的系统是边缘不稳定的,在频率处的稳定边界上有一个极点wcMMIO。CriticalFrequency,当P是否用最坏情况的不确定性值进行评估wcu.
这些状态空间模型输入而且输出对角扰动是这种形式吗F(s) = diag(f1(s),…,fN(s)).每一个fj (s)是一个实参数动态系统,实现了最坏情况下的复杂增益和相位变化应用于反馈回路的每个通道。
信息-关于最坏情况值的附加信息
结构
关于最坏情况值的附加信息,作为具有以下字段的结构返回:
| 场 | 描述 |
|---|---|
|
磁盘裕度最小的模型的索引 |
|
频率点
的 |
|
模型的实际最坏情况磁盘边缘的下界和上界,作为数组返回。 |
|
每个频率点的最坏扰动
|
|
最坏情况下磁盘边缘对每个不确定元素的灵敏度,返回为结构时 如果 |
提示
wcdiskmargin假设负面反馈。若要计算正反馈系统的最差情况磁盘裕度,请使用wcdiskmargin (- l)或wcdiskmargin (P - c).你可以用
wcdiskmarginplot.
算法
wcdiskmargin模型的增益(和相位)变化为umargin不确定性,将其与指定的工厂不确定性结合起来,并使用mussv计算最坏情况下的圆盘边缘和扰动。这概括了diskmargin不确定性反馈回路的算法。有关磁盘裕度计算和解释的更多信息,请参见利用盘边距进行稳定性分析.
版本历史
在R2018b中引入您也可以从以下列表中选择一个网站: