主要内容
readMessages
从ROSBAG阅读消息
描述
公司= ReadMessages(___“DataFormat”,“结构”)RosgenMsg..
例子
以单元数组的形式返回ROS消息
阅读rosbag和过滤话题和时间。
bagselect = rosbag ('ex_multiple_topics.bag');bagselect2 =选择(bagselect,“时间”,...[bagselect.startTime Backselect.startTime + 1],“主题”,'/ odom');
以单元格数组的形式返回所有消息。
allMsgs = readMessages (bagselect2);
以单元格数组的形式返回前10条消息。
firstMsgs = readMessages (bagselect2 1:10);
阅读信息从一个rosbag作为一个结构
加载ROSBAG。
袋= rosbag ('ros_turtlesim.bag');
选择特定主题。
bSel =选择(包,“主题”,'/ turtle1 / pose');
将消息作为结构。指定DataFormat读取消息时的名称-值对。检查返回的结构单元数组中的第一个结构。
msgStructs = readMessages (bSel,'datomformat','struct');msgStructs {1}
ans =结构体字段:MessageType:'turtlesim / pose'x:5.5016 y:6.3965θ:4.5377线性透视:1 Angularvelocity:0
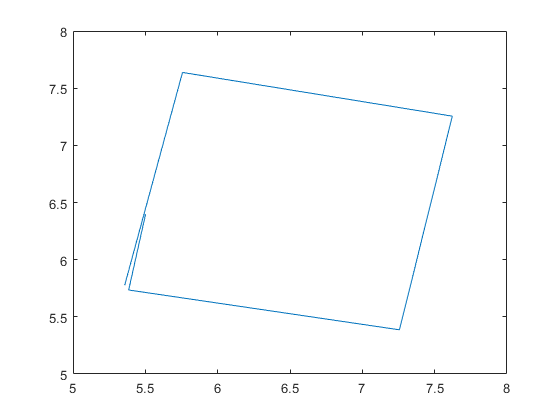
提取xy从信息点并绘制机器人轨迹。
使用cellfun提取所有X和Y来自结构的字段。这些字段代表xyROSBAG录制期间机器人的位置。
xPoints = cellfun(@(m) double(m. x),msgStructs);yPoints = cellfun(@(m) double(m.Y),msgStructs);情节(xPoints yPoints)
输入参数
输出参数
兼容性考虑因素
另请参阅
介绍了R2019b
您还可以从以下列表中选择一个网站: