从CAD工具导入3D模型
要从CAD工具导入模型,请将您的产品装配模型转换为X3D格式金宝app®3D动画™软件大多数CAD工具都有X3D导出过滤器。如果CAD工具中不能直接使用导出过滤器,您可以使用第三方提供的转换实用工具。
在将CAD模型导出为X3D格式时,可以设置几个选项来定制输出。您可以设置特定于导出过滤器或通用CAD文件属性的选项。有关如何设置这些属性的具体细节,请参阅CAD系统文档。一些最典型和有用的CAD文件属性是:
细节考虑水平
导出文件中使用的单位
使用坐标系
装配层次结构
细节考虑水平
通常CAD模型是参数模型,使用专有对象呈现方法来处理各种上下文。在模型导出期间,组装的内部参数模型是镶嵌。在该过程中,模型表面被分成三角网格,由此表示IndexedFaceSet节点。在晶圆之前,设置网格的粒度,使其适合进一步使用。修改多边形计数以后是不实用的。对象形状和结构的分辨率独立信息丢失,无法基于镶嵌模型重建。
有效渲染活动部件,保持虚拟世界模型尽可能简单,可见模型降低。在这两个要求之间找到适当的妥协。
计算机和图形加速器具有一系列性能水平,因此对于适合使用的多边形或三角形的数量没有坚定的建议。要评估模型的复杂性,您可以在其中显示结果的虚拟世界3D文件金宝app仿真软件3 d动画观众并观察观众对导航的响应。如果您可以在没有任何重要延迟的情况下导航虚拟世界,则该模型适合进一步的工作。如果将虚拟世界连接到Simulink模型,则可以访问更精确的适用性衡量标准。金宝app例如,您可以在仿真期间找到每秒渲染的帧数。
导出文件中使用的单位
X3D长度单位为米。为了在虚拟世界中正确缩放出口零件,使用仪表输出零件。如果导出的对象大小不同,可以考虑以其他规模创建虚拟世界。在这种情况下,使用米以外的单位输出对象。
虚拟现实观众使用可与人的维度相媲美的维度进行测量,以达到虚拟现实的沉浸感效果。观众认为你准备好了场景,以便场景中的虚拟访客(虚拟角色)可以穿过或检查它。角色的物理尺寸用于计算碰撞检测、近目标剪辑或地形跟踪等目的。要自定义角色维度和其他特定于导航的参数,如默认导航速度),请使用NavigationInfo节点。这金宝app仿真软件3 d动画查看器使虚拟世界中的有效导航,包括缩放场景。例如,您可以使用Viewer检查微型对象或在空间中可视化大规模的飞机操作。
使用坐标系
X3D使用笛卡尔坐标系,定义了坐标轴,这样:
+X要点对
+y点了
+Z.屏幕外的点
为了避免以后将对象轴转换为虚拟世界系统,只要可能,使用相同的坐标系统导出CAD模型。如果您的CAD工具使用不同的坐标系统,并且不允许您为导出的对象更改它,请注意系统差异。然后稍后在模型中实现坐标轴转换。
例如,如果你导出一个车辆模型,使它指向+X虚拟世界的道路上的轴:
使道路也指向+X方向。
使用X车辆动态模型的坐标。
记下坐标系中零件的方向。
当CAD工具允许您动画部件和程序集时,将其位置重置为导出之前的初始状态。
装配层次结构
部件组装的导出根据模型的结构而变化,通常有两种形式:
所有的部分都是相互独立的,或者场景中的物体在场景层次的同一层是相互独立的。导出的虚拟世界3D文件具有扁平结构,所有部件坐标都在全局坐标中定义。
部件遵循CAD工具中定义的层次结构。导出的虚拟世界3D文件通过此层次结构使用
Transform-children机制,以创建嵌套结构。在这种情况下,通常零件坐标是在零件的父零件的局部坐标系中定义的。例如,您可以使用以下对象层次结构导出机器人。每个部分的坐标都定义在父级的本地坐标系中:
旋转支架-手臂-手金宝app腕-手-工具
当旋转支撑件移动时,所有其他部件都设金宝app计用于与其一起移动。
虚拟世界3D文件的层次结构必须对应于装配动态模型中使用的坐标,如下所示:
如果所有部件都在Simulink或金宝appSimscape™多体™模型在全局坐标中定义,使用平面虚拟世界结构。
如果所有部件都在Simulink或金宝appSimscape multibody.模型遵循分层关系,使用嵌套的虚拟世界结构。
为了说明这两种情况,想象一下旋转摆锤。由于灰色臂围绕垂直轴旋转,橙色摆摆动Z.旋转灰色臂的局部坐标轴。
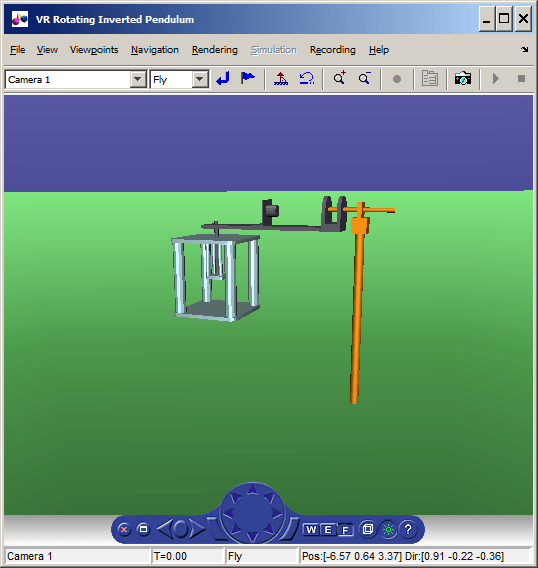
如果钟摆动力学模型对所有运动部件使用全局坐标,则虚拟世界模型具有扁平结构。
下面是平面结构的代码。

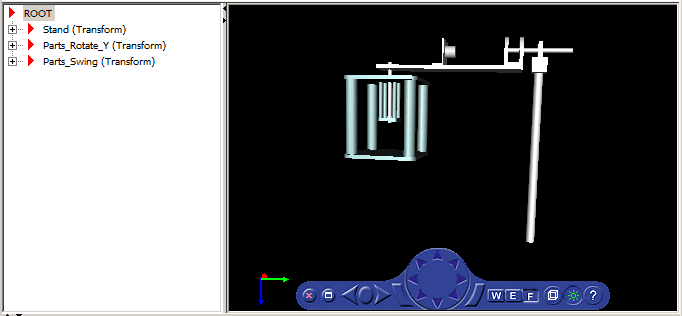
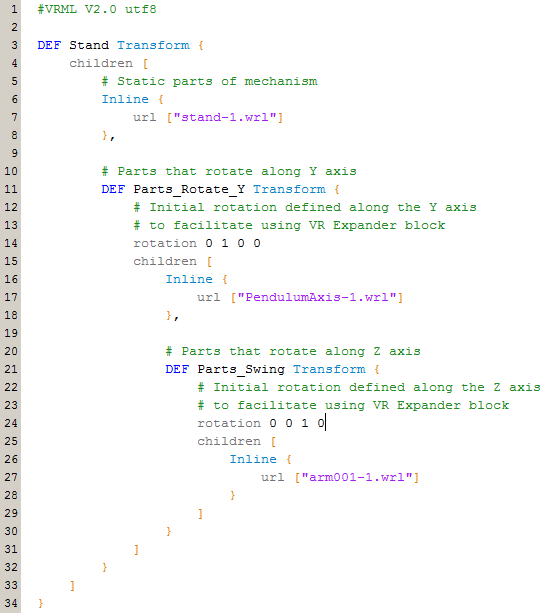
如果摆动动力学模型使用本地坐标进行运动部件,则相应的虚拟世界模型具有嵌套结构。
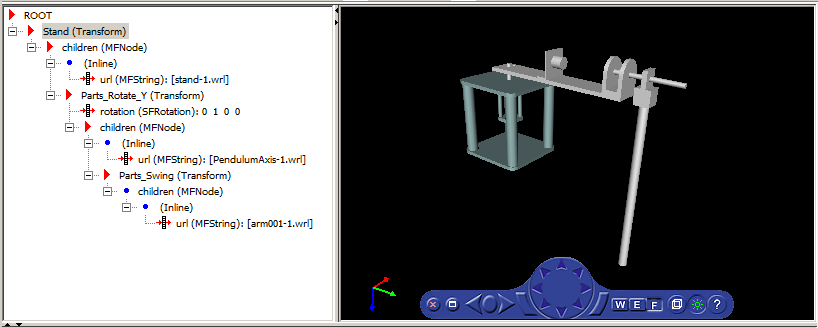
下面是嵌套结构的代码。
一些第三方工具允许您将组件的每个部分导出到单独的虚拟世界3D文件中。属性在一个主文件中引用所有部分排队机制。推荐使用这种方式引用程序集,因为主文件很小,易于理解和修改。
也可以看看
职能
相关的话题
你也可以从以下列表中选择一个网站: